
A Fourier Series-Based Multi-Point Excitation Model for Crowd Jumping Loads




Abstract
:1. Introduction
2. Experimental Arrangement
2.1. Verification Experiment for 3D MCT
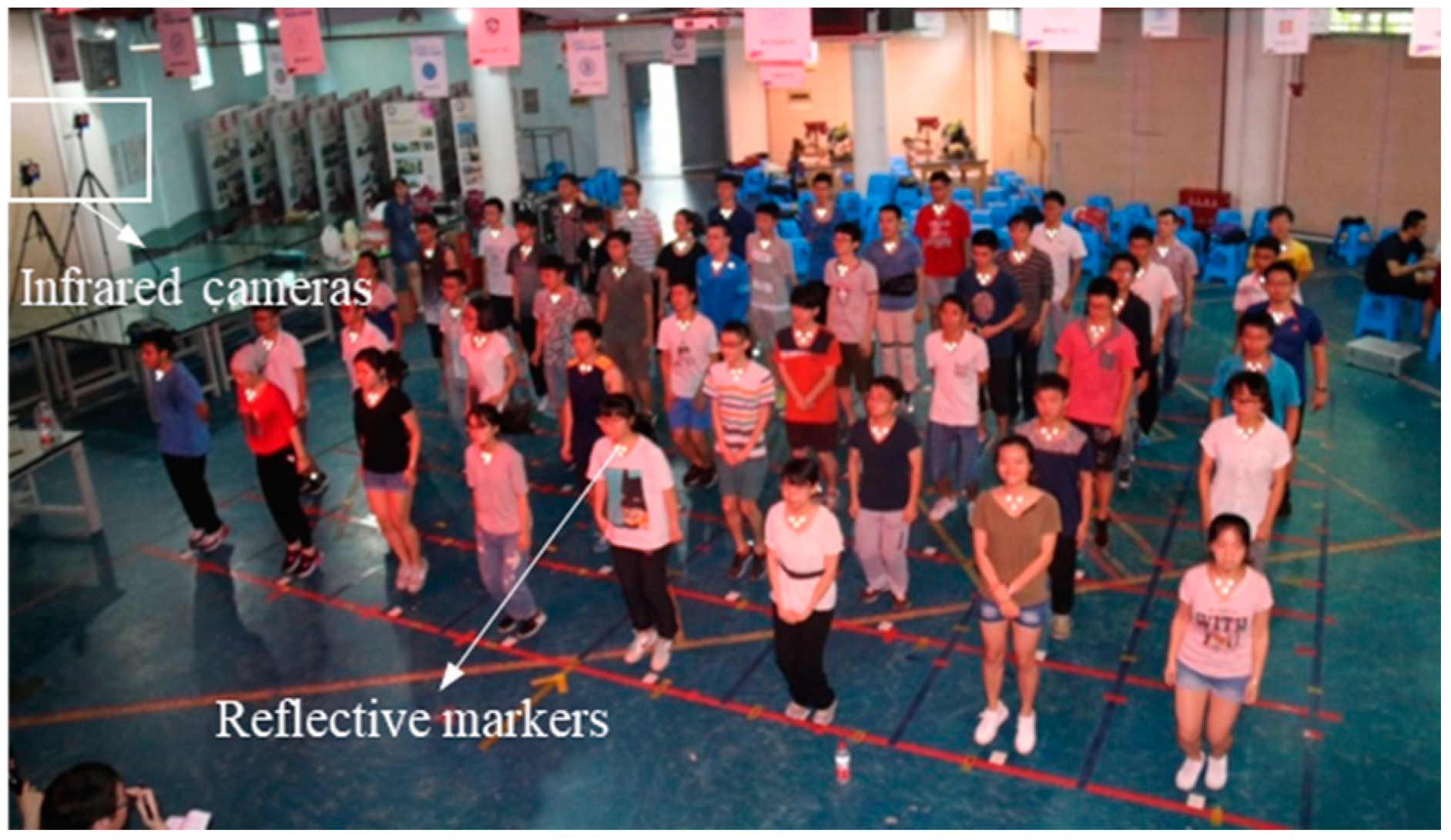
2.2. Crowd Jumping Experiment
3. Development of the Crowd Jumping Load Model
3.1. Mathematical Representation
3.2. Verification for 3D MCT
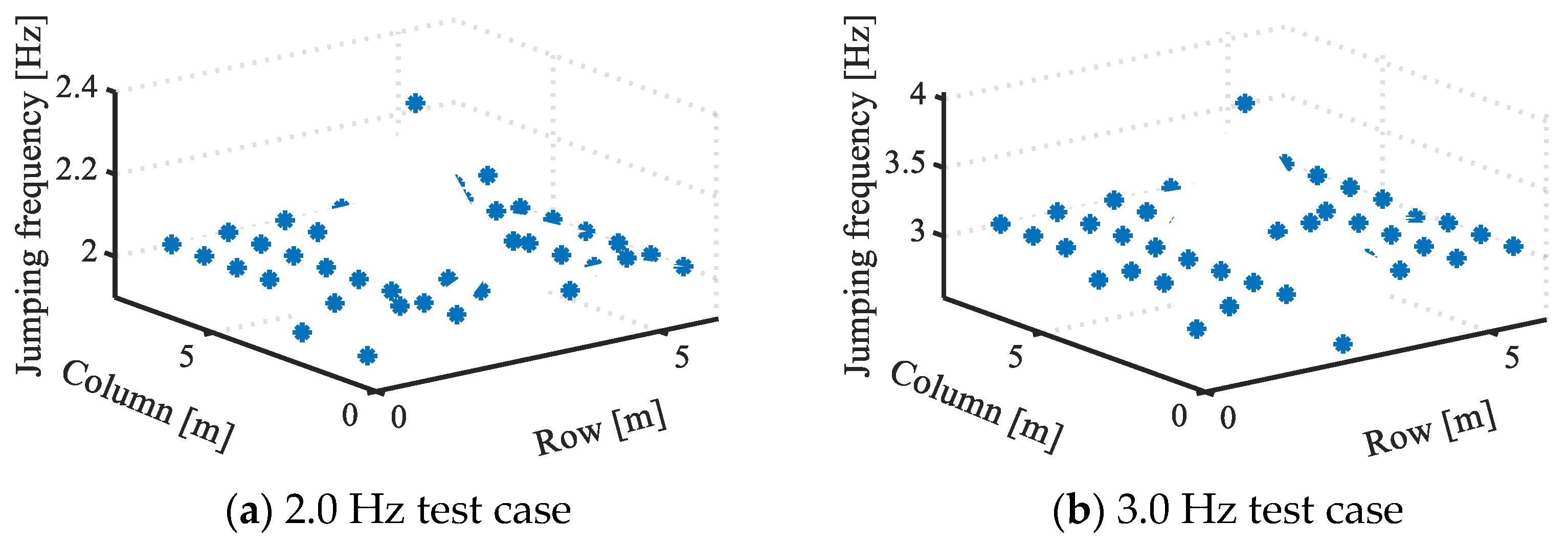
3.3. Jumping Frequency
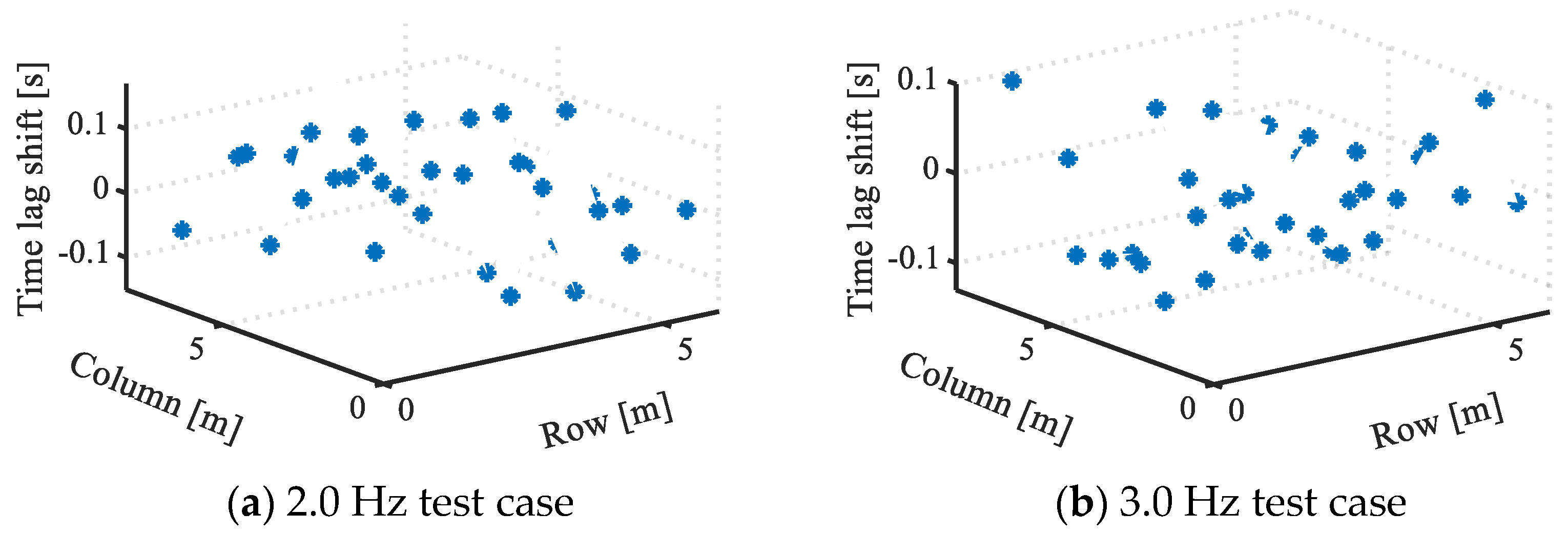
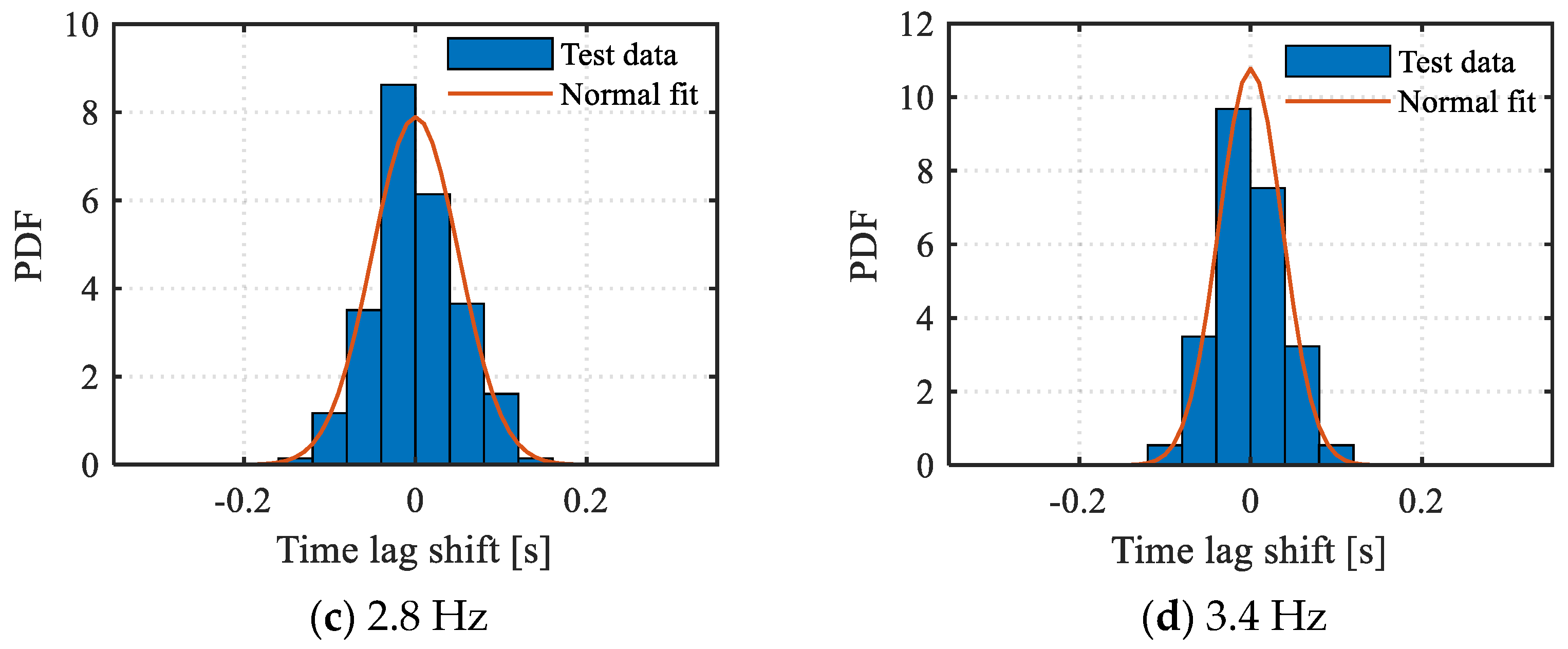
3.4. Time Lag Shift
4. Crowd Jumping Load Simulation
4.1. Procedure for Simulating Crowd Jumping Loads
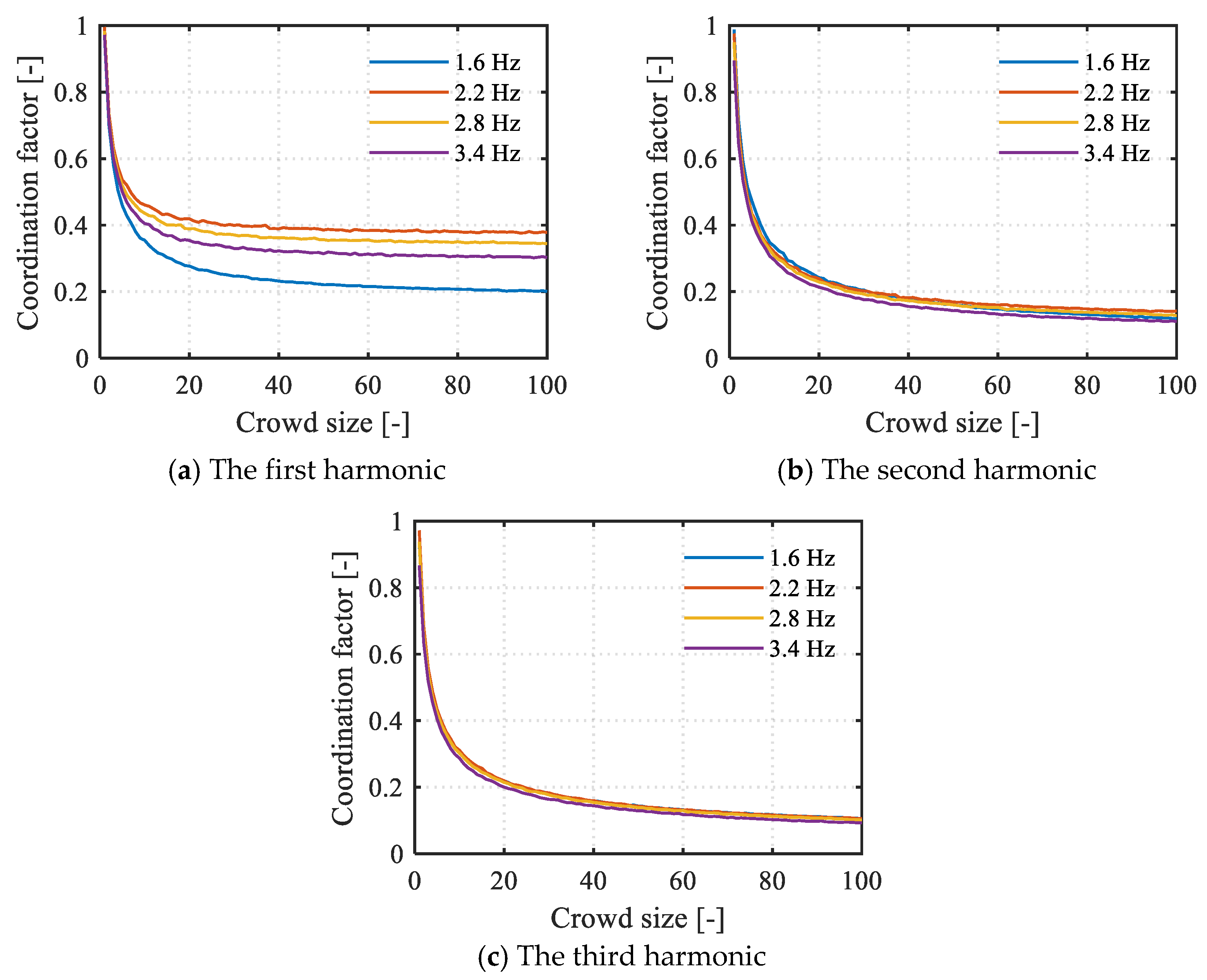
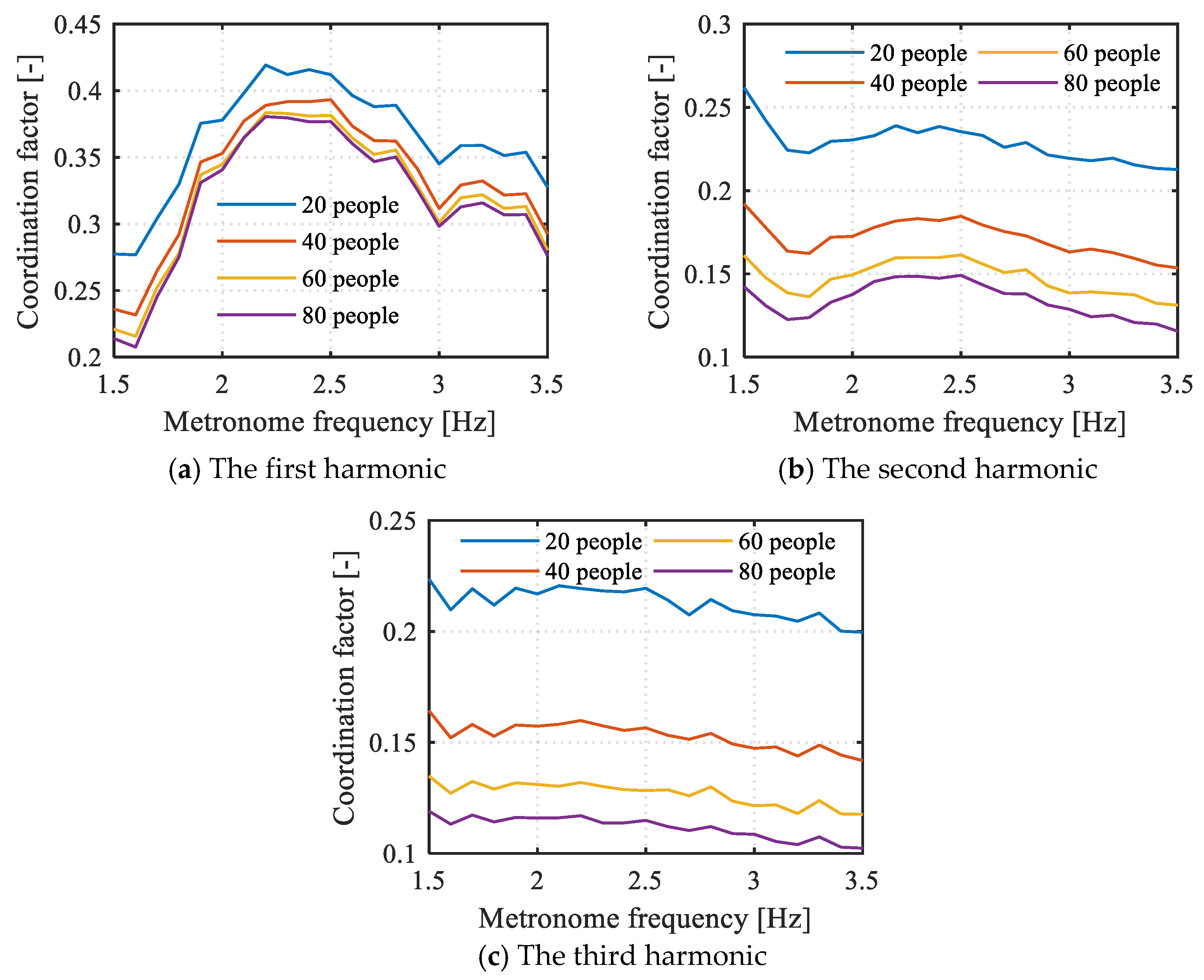
4.2. Coordination Factor of Simulated Crowd Jumping Loads
4.3. Comparison with BRE Digest 2004 and ISO 10137 2007
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zeng, D.; Wang, H.; Chen, J. Dynamic reliability analysis of large-span structures under crowd bouncing excitation. Buildings 2022, 12, 332. [Google Scholar] [CrossRef]
- Xiong, J.; Duan, S.; Qian, H.; Pan, Z. Equivalent dynamic load factor of different non-exceedance probability for crowd jumping loads. Buildings 2022, 12, 450. [Google Scholar] [CrossRef]
- Živanovic, S.; Lin, B.; Dang, H.V.; Zhang, S.; Cosic, M.; Caprani, C.; Zhang, Q. Evaluation of inverted-pendulum-with-rigid-legs walking locomotion models for civil engineering applications. Buildings 2022, 12, 1216. [Google Scholar] [CrossRef]
- Wang, Z.; Song, L.; Cheng, Z.; Yang, H.; Wen, J.; Qi, M. Finite element model for vibration serviceability evaluation of a suspended floor with and without tuned mass dampers. Buildings 2023, 13, 309. [Google Scholar] [CrossRef]
- Lee, S.H.; Lee, K.K.; Woo, S.S.; Cho, S.H. Global vertical mode vibrations due to human group rhythmic movement in a 39 story building structure. Eng. Struct. 2013, 57, 296–305. [Google Scholar] [CrossRef]
- Wolmuth, B.; Surtees, J. Crowd-related failure of bridges. Proc. ICE Civ. Eng. 2003, 156, 116–123. [Google Scholar] [CrossRef]
- Dallard, P.; Flint, A.; le Bourva, S.; Low, A.; Smith, R.M.R.; Willford, M. The London Millenium Footbridge. Struct. Eng. 2001, 79, 17–35. [Google Scholar] [CrossRef]
- de Brito, V.L.; Pimentel, R.L. Cases of collapse of demountable grandstands. J. Perform. Constr. Facil. 2009, 23, 151–159. [Google Scholar] [CrossRef]
- Sim, J.; Blakeborough, A.; Williams, M.S.; Parkhouse, G. Statistical model of crowd jumping loads. J. Struct. Eng. 2008, 134, 1852–1861. [Google Scholar] [CrossRef]
- Xiong, J.; Chen, J. Open access and updated human-induced load data set. J. Struct. Eng. 2021, 147, 4720003. [Google Scholar] [CrossRef]
- Jones, C.A.; Reynolds, P.; Pavic, A. Vibration serviceability of stadia structures subjected to dynamic crowd loads: A literature review. J. Sound Vib. 2011, 330, 1531–1566. [Google Scholar] [CrossRef]
- Ji, T.; Ellis, B.R. Floor vibration induced by dance-type loads: Theory. Struct. Eng. 1994, 72, 37–44. [Google Scholar]
- Duan, S.; Xiong, J.; Qian, H. Generative adversarial networks-based stochastic approach to the modeling of individual jumping loads. Int. J. Struct. Stab. Dyn. 2021, 21, 2150047. [Google Scholar] [CrossRef]
- Chen, J.; Wang, H.; Wang, L. Experimental investigation on single person’s jumping load model. Earthq. Eng. Eng. Vib. 2015, 14, 703–714. [Google Scholar] [CrossRef]
- Racic, V.; Pavic, A. Stochastic approach to modelling of near-periodic jumping loads. Mech. Syst. Signal Process. 2010, 24, 3037–3059. [Google Scholar] [CrossRef]
- Martínez, J.F.; Hermanns, L.; de Lerma, A.F.; Álvarez, E.A. Jumping load models applied on a gymnasium floor. Eng. Struct. 2016, 125, 26–38. [Google Scholar] [CrossRef]
- Živanovic, S.; Pavic, A.; Reynolds, P. Vibration serviceability of footbridges under human-induced excitation: A literature review. J. Sound Vib. 2005, 279, 1–74. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Li, G.; Racic, V. A data-driven wavelet-based approach for generating jumping loads. Mech. Syst. Signal Process. 2018, 106, 49–61. [Google Scholar] [CrossRef]
- Ellis, B.R.; Ji, T. Loads generated by jumping crowds: Numerical modelling. Struct. Eng. 2004, 82, 35–40. [Google Scholar]
- Kasperski, M.; Agu, E. Prediction of crowd-induced vibrations via simulation. In Proceedings of the 23rd International Modal Analysis Conference, Orlando, FL, USA, 31 January–3 February 2005. [Google Scholar]
- Parkhouse, J.G.; Ewins, D.J. Crowd-induced rhythmic loading. Struct. Build. 2006, 159, 247–259. [Google Scholar] [CrossRef]
- Li, G.; Ji, T.; Chen, J. Determination of the dynamic load factors for crowd jumping using motion capture technique. Eng. Struct. 2018, 174, 1–9. [Google Scholar] [CrossRef]
- Shen, J.; Ren, X.; Chen, J. Effects of spatial variability of ground motions on collapse behaviour of buildings. Soil Dyn. Earthq. Eng. 2021, 144, 106668. [Google Scholar] [CrossRef]
- Shen, J.; Chen, J.; Ding, G. Random field model of sequential ground motions. Bull. Earthq. Eng. 2020, 18, 5119–5141. [Google Scholar] [CrossRef]
- Krenk, S. Wind field coherence and dynamic wind forces. In Proceedings of the IUTAM Symposium on Advances in Nonlinear Stochastic Mechanics, Trondheim, Norway, 3–7 July 1995. [Google Scholar] [CrossRef]
- Racic, V.; Brownjohn, J.M.W.; Pavic, A. Reproduction and application of human bouncing and jumping forces from visual marker data. J. Sound Vib. 2010, 329, 3397–3416. [Google Scholar] [CrossRef]
- Mazzoleni, P.; Zappa, E. Vision-based estimation of vertical dynamic loading induced by jumping and bobbing crowds on civil structures. Mech. Syst. Signal. Process. 2012, 33, 1–12. [Google Scholar] [CrossRef]
- Celik, O.; Dong, C.Z.; Catbas, F.N. A computer vision approach for the load time history estimation of lively individuals and crowds. Comput. Struct. 2018, 200, 32–52. [Google Scholar] [CrossRef]
- Xiong, J.; Chen, J. Random field model for crowd jumping loads. Struct. Saf. 2019, 76, 197–209. [Google Scholar] [CrossRef]
- Ellis, B.R.; Ji, T. The Response of Structures to Dynamic Crowd Loads; BRE Digest 426: Manchester, UK, 2004. [Google Scholar]
- ISO 10137:2007; Bases for Design of Structures—Serviceability of Buildings and Walkways against Vibration. ISO: Geneva, Switzerland, 2007.
- Larsen, R.J.; Marx, M.L. An Introduction to Mathematical Statistics and Its Applications; Pearson: New York, NY, USA, 2017. [Google Scholar]
- Xiong, J.; Chen, J. Power spectral density function for individual jumping load. Int. J. Struct. Stab. Dyn. 2018, 18, 1850023. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Case [Hz] | 3.51 | 3.52 | 3.53 | 1.51 | 2.01 | 2.02 | 2.03 | 2.671 | 2.672 | 2.673 |
|---|---|---|---|---|---|---|---|---|---|---|
| [s] | 0.07 | 0.09 | 0.04 | −0.04 | 0.02 | 0.02 | 0.00 | −0.01 | 0.04 | 0.02 |
| [s] | 0.06 | 0.09 | 0.04 | −0.04 | 0.02 | 0.01 | 0.00 | −0.01 | 0.03 | 0.02 |
| [Hz] | 3.5 | 3.5 | 3.5 | 1.5 | 2.0 | 2.0 | 2.0 | 2.67 | 2.67 | 2.67 |
| [Hz] | 3.5 | 3.5 | 3.5 | 1.5 | 2.0 | 2.0 | 2.0 | 2.67 | 2.67 | 2.67 |
| [Hz] | 3.5 | 3.5 | 3.5 | 1.5 | 2.0 | 2.0 | 2.0 | 2.67 | 2.67 | 2.67 |
| [Hz] | 3.5 | 3.5 | 3.5 | 1.5 | 2.0 | 2.0 | 2.0 | 2.67 | 2.67 | 2.67 |
| Metronome Frequency [Hz] | Jumping Frequency [Hz] | |
|---|---|---|
| Average | Standard Deviation | |
| 1.5 | 1.59 | 0.25 |
| 1.6 | 1.70 | 0.21 |
| 1.7 | 1.76 | 0.17 |
| 1.8 | 1.85 | 0.10 |
| 1.9 | 1.92 | 0.07 |
| 2.0 | 2.02 | 0.09 |
| 2.1 | 2.11 | 0.06 |
| 2.2 | 2.20 | 0.06 |
| 2.3 | 2.30 | 0.07 |
| 2.4 | 2.40 | 0.08 |
| 2.5 | 2.48 | 0.06 |
| 2.6 | 2.58 | 0.08 |
| 2.7 | 2.67 | 0.11 |
| 2.8 | 2.78 | 0.12 |
| 2.9 | 2.88 | 0.14 |
| 3.0 | 2.99 | 0.13 |
| 3.1 | 3.08 | 0.16 |
| 3.2 | 3.17 | 0.15 |
| 3.3 | 3.27 | 0.16 |
| 3.4 | 3.37 | 0.17 |
| 3.5 | 3.45 | 0.20 |
| Test Case [Hz] | Closure Errors [×10−2 s] | ||||
|---|---|---|---|---|---|
| 1st Time | 2nd Time | 3rd Time | 4th Time | 5th Time | |
| 1.5 | 0.96 | 0.65 | 0.22 | 1.87 | \ |
| 1.6 | 0.46 | 2.03 | 0.23 | 1.93 | \ |
| 1.7 | 0.39 | 0.86 | 1.08 | 0.34 | 0.51 |
| 1.8 | 0.71 | 1.31 | 1.08 | 0.59 | \ |
| 1.9 | 0.88 | 0.29 | 0.79 | 0.26 | 0.78 |
| 2.0 | 0.04 | 0.44 | 0.28 | 0.22 | 0.62 |
| 2.1 | 0.65 | 0.55 | 0.91 | 1.25 | \ |
| 2.2 | 0.79 | 0.37 | 0.64 | 0.30 | \ |
| 2.3 | 0.38 | 0.39 | 0.12 | 0.17 | \ |
| 2.4 | 0.21 | 0.21 | 0.57 | 0.34 | \ |
| 2.5 | 0.14 | 0.12 | 0.90 | 1.07 | 0.23 |
| 2.6 | 1.13 | 0.17 | 0.13 | 0.14 | 1.29 |
| 2.7 | 0.55 | 0.06 | 0.31 | 1.02 | 0.59 |
| 2.8 | 0.17 | 0.15 | 0.15 | 0.14 | 0.12 |
| 2.9 | 0.02 | 0.51 | 0.02 | 0.14 | \ |
| 3.0 | 0.45 | 0.33 | 0.22 | 0.29 | \ |
| 3.1 | 0.08 | 0.55 | 0.15 | \ | \ |
| 3.2 | 0.74 | 0.12 | 0.13 | \ | \ |
| 3.3 | 0.31 | 0.29 | 0.41 | \ | \ |
| 3.4 | 0.08 | 0.08 | 0.19 | \ | \ |
| 3.5 | 0.19 | 0.19 | 0.13 | \ | \ |
| Jumping Frequency [Hz] | Standard Deviation | |
|---|---|---|
| Δt [s] | ψ [-] | |
| 1.5 | 0.125 | 1.181 |
| 1.6 | 0.083 | 0.835 |
| 1.7 | 0.095 | 1.016 |
| 1.8 | 0.081 | 0.921 |
| 1.9 | 0.068 | 0.823 |
| 2.0 | 0.071 | 0.898 |
| 2.1 | 0.058 | 0.767 |
| 2.2 | 0.051 | 0.715 |
| 2.3 | 0.056 | 0.809 |
| 2.4 | 0.052 | 0.790 |
| 2.5 | 0.042 | 0.671 |
| 2.6 | 0.051 | 0.836 |
| 2.7 | 0.051 | 0.867 |
| 2.8 | 0.050 | 0.889 |
| 2.9 | 0.048 | 0.892 |
| 3.0 | 0.048 | 0.918 |
| 3.1 | 0.043 | 0.844 |
| 3.2 | 0.041 | 0.837 |
| 3.3 | 0.041 | 0.859 |
| 3.4 | 0.037 | 0.790 |
| 3.5 | 0.039 | 0.873 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xiong, J.; Cao, Z.; Duan, S.; Cao, B.; Qian, H.; Li, C. A Fourier Series-Based Multi-Point Excitation Model for Crowd Jumping Loads. Buildings 2023, 13, 1782. https://doi.org/10.3390/buildings13071782
Xiong J, Cao Z, Duan S, Cao B, Qian H, Li C. A Fourier Series-Based Multi-Point Excitation Model for Crowd Jumping Loads. Buildings. 2023; 13(7):1782. https://doi.org/10.3390/buildings13071782
Chicago/Turabian StyleXiong, Jiecheng, Zhongsui Cao, Shuqian Duan, Bei Cao, Hui Qian, and Chenyang Li. 2023. "A Fourier Series-Based Multi-Point Excitation Model for Crowd Jumping Loads" Buildings 13, no. 7: 1782. https://doi.org/10.3390/buildings13071782
APA StyleXiong, J., Cao, Z., Duan, S., Cao, B., Qian, H., & Li, C. (2023). A Fourier Series-Based Multi-Point Excitation Model for Crowd Jumping Loads. Buildings, 13(7), 1782. https://doi.org/10.3390/buildings13071782