Artificial Neural Networks in Coordinated Control of Multiple Hovercrafts with Unmodeled Terms



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Formulation
2.1. Vehicle Modeling
2.2. Graph Theory
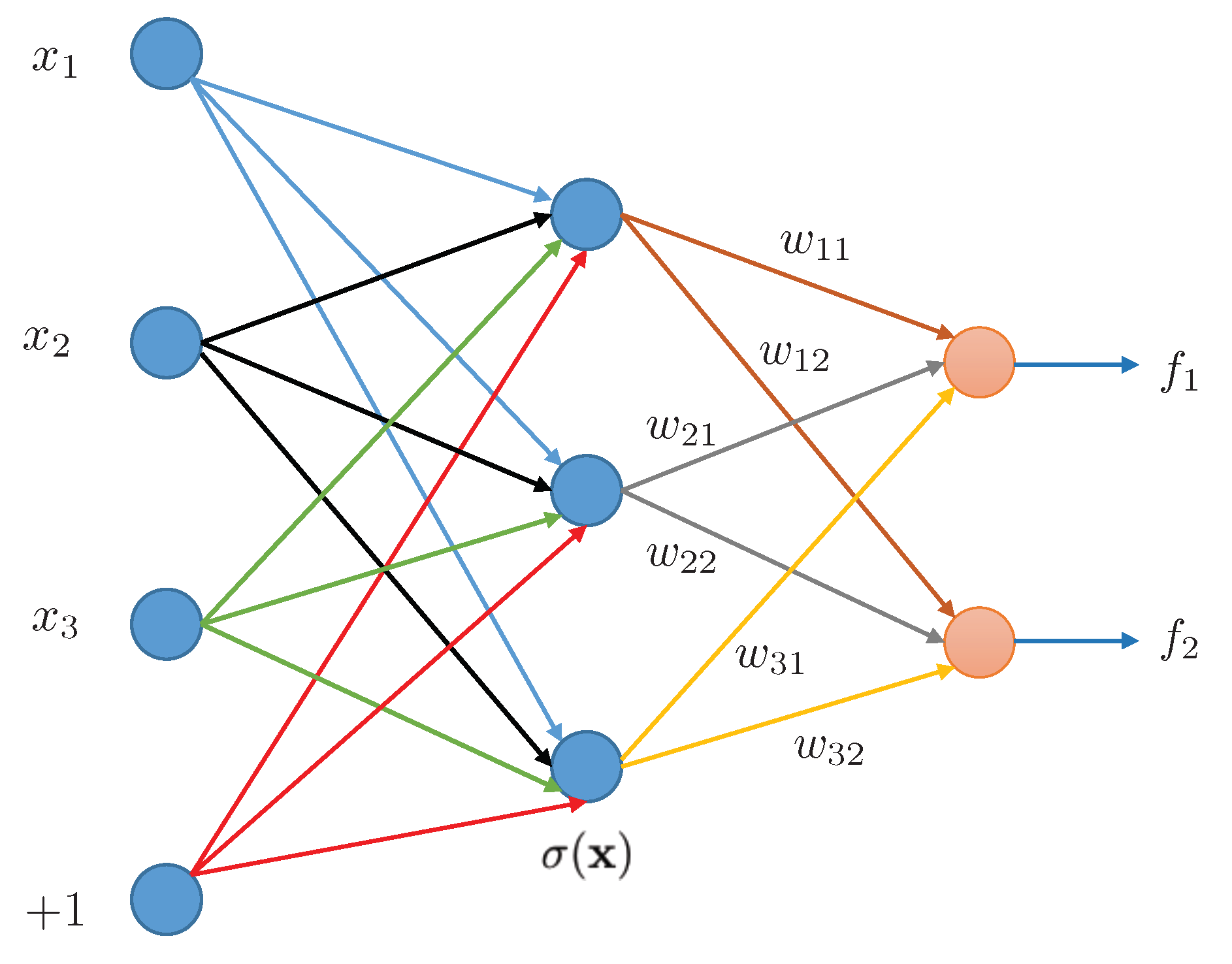
2.3. Radial Basis Function Neural Networks
2.4. Problem Statement
- (1)
- for an individual vehicle, , where is an arbitrarily small constant value;
- (2)
- for a group of n desired paths, and , where agent j is the neighbor of agent i, represents the desired value of , which is a known value.
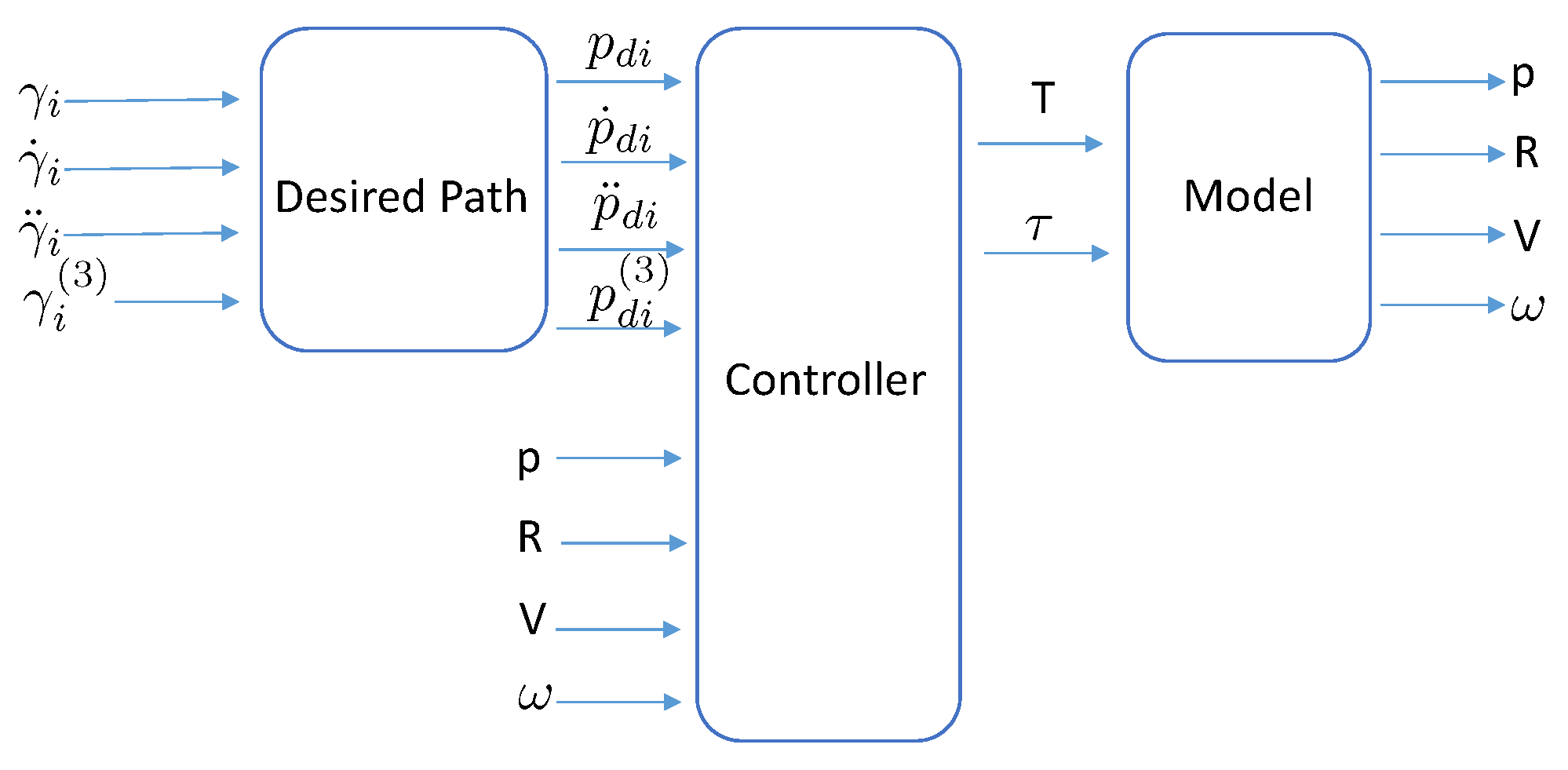
3. Controller Design
- (1)
- ;
- (2)
- is Lipschitz continuous;
- (3)
- ;
- (4)
- , where .
3.1. Stability Analysis
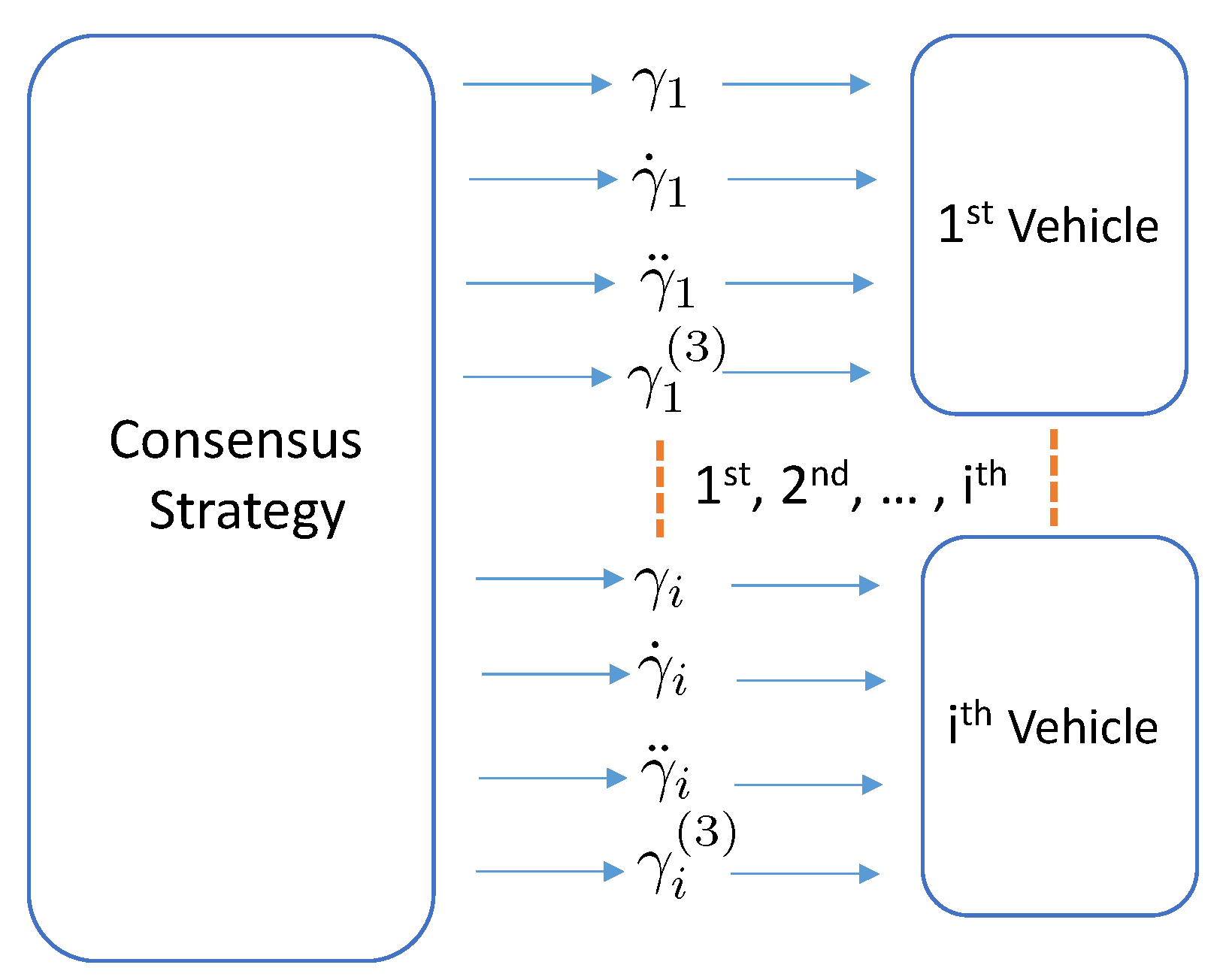
4. Consensus Strategy
4.1. Stability Analysis
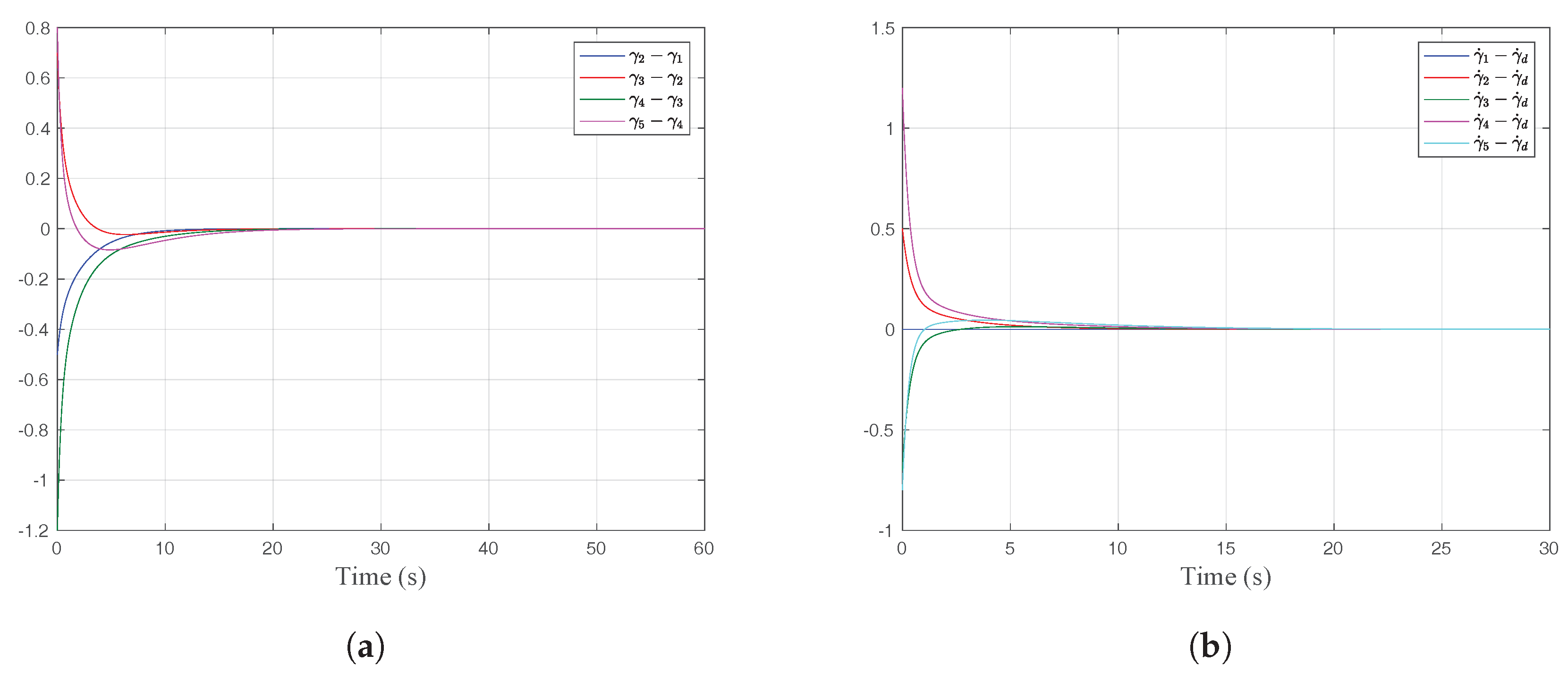
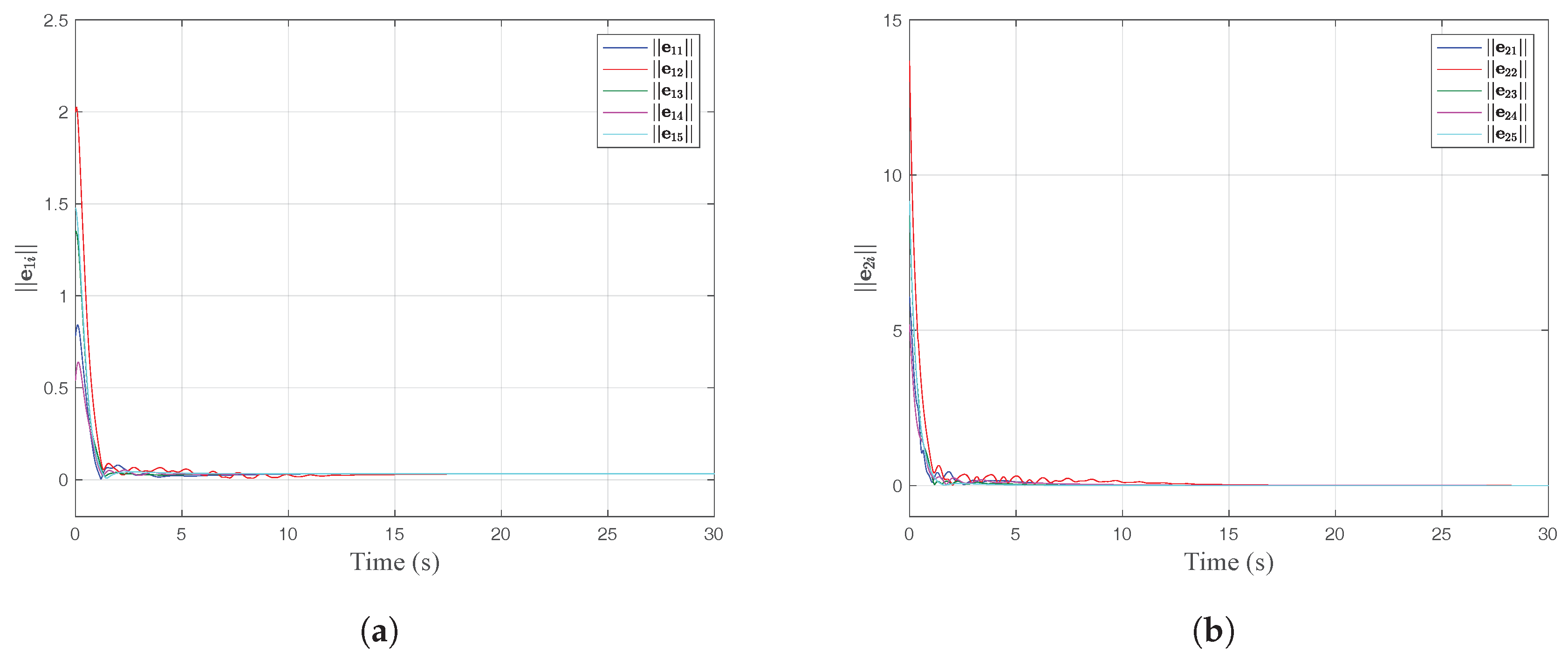
5. Simulation Results
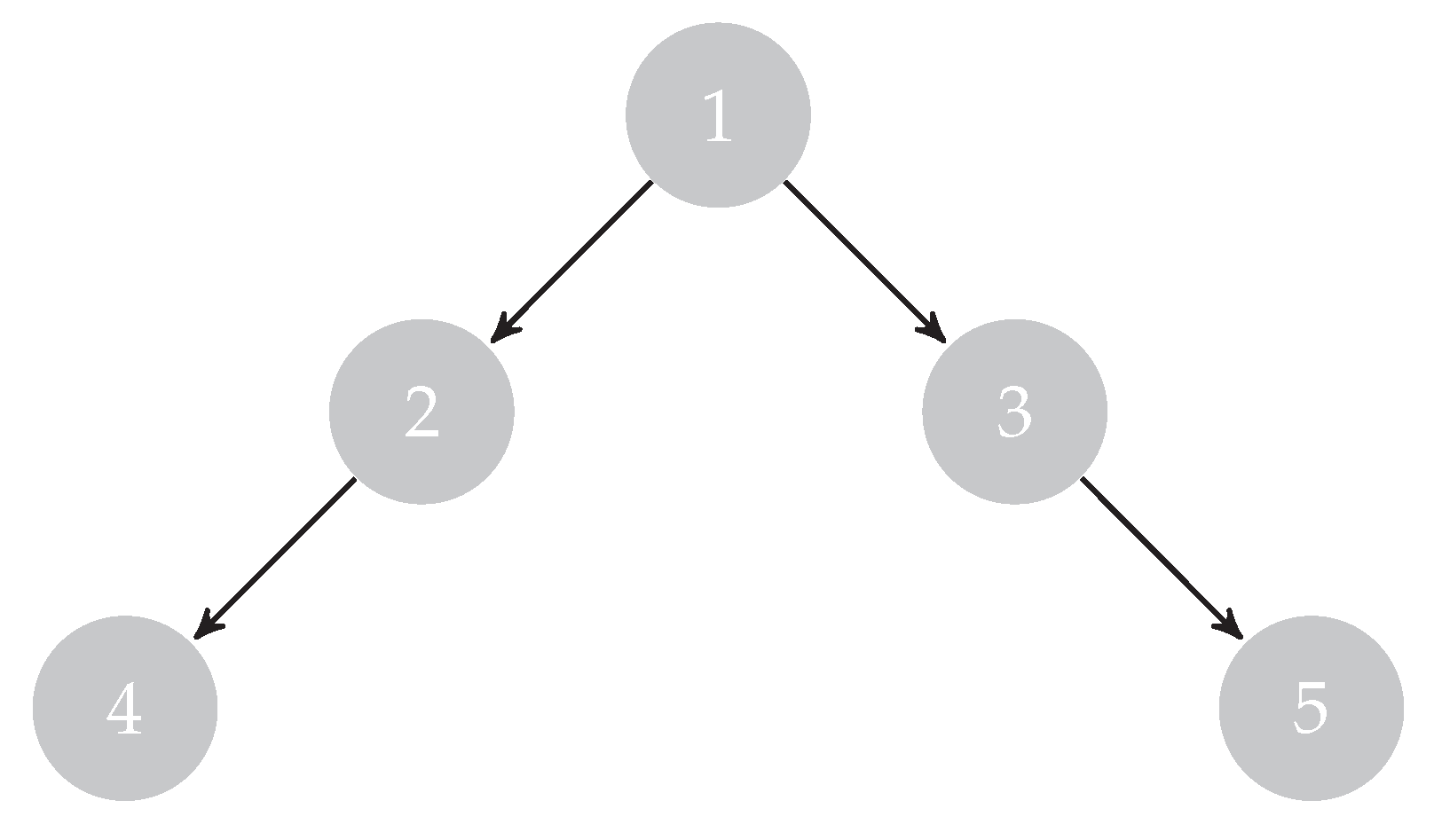
5.1. The Cascade-Directed Communication Graph
5.2. Parallel Communication Graph
- (1)
- 1st vehicle:
- (2)
- 2nd vehicle:
- (3)
- 3rd vehicle:
- (4)
- 4th vehicle:
- (5)
- 5th vehicle:
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Rawat, P.; Singh, K.D.; Chaouchi, H.; Bonnin, J.M. Wireless sensor networks: a survey on recent developments and potential synergies. J. Supercomput. 2014, 68, 1–48. [Google Scholar] [CrossRef]
- Yick, J.; Mukherjee, B.; Ghosal, D. Wireless sensor network survey. Comput. Netw. 2008, 52, 2292–2330. [Google Scholar] [CrossRef]
- Majid, M.H.A.; Arshad, M.R. A Fuzzy Self-Adaptive PID Tracking Control of Autonomous Surface Vehicle. In Proceedings of the IEEE International Conference on Control System, Computing and Engineering, George Town, Malaysia, 27–29 November 2015. [Google Scholar]
- Fantoni, I.; Lozano, R.; Mazenc, F.; Pettersen, K.Y. Stabilization of a nonlinear underactuated hovercraft. In Proceedings of the 38th Conference on Decision and Control, Phoenix, AZ, USA, 7–10 December 1999. [Google Scholar]
- Do, K.D.; Jiang, Z.P.; Pan, J. Underactuated Ship Global Tracking Under Relaxed Conditions. IEEE Trans. Autom. Control 1999, 47, 1529–1536. [Google Scholar] [CrossRef]
- Do, K.D.; Jiang, Z.P.; Pan, J. Universal controllers for stabilization and tracking of underactuated ships. Syst. Control Lett. 2002, 47, 299–317. [Google Scholar] [CrossRef]
- Aguiar, A.P.; Cremean, L.; Hespanha, J.P. Position tracking for a nonlinear underactuated hovercraft: Controller design and experimental results. In Proceedings of the 42nd IEEE Conference on Decision and Control, Maui, HI, USA, 9–12 December 2003; Volume 4, pp. 3858–3863. [Google Scholar]
- Bertaska, I.R.; Ellenrieder, K.D. Experimental Evaluation of Supervisory Switching Control for Unmanned Surface Vehicle. IEEE J. Ocean. Eng. 2017. [Google Scholar] [CrossRef]
- Xie, W. Robust Motion Control of Underactuated Autonomous Surface Craft. Master’s Thesis, University of Macau, Macau, China, 2016. [Google Scholar]
- Peng, Z.H.; Wang, J.; Wang, D. Distributed Maneuvering of Autonomous Surface Vehicles Based on Neurodynamic Optimization and Fuzzy Approximation. IEEE Trans. Control Syst. Technol. 2018, 26, 1083–1090. [Google Scholar] [CrossRef]
- Chen, X.; Tan, W.W. Tracking control of surface vessel via fault tolerant adaptive backstepping interval type-2 fuzzy control. Ocean Eng. 2013, 26, 97–109. [Google Scholar] [CrossRef]
- Wang, N.; Meng, J.E. Self-Constructing Adaptive Robust Fuzzy Neural Tracking Control of Surface Vehicles With Uncertainties and Unknown Disturbances. IEEE Trans. Control Syst. Technol. 2015, 23, 991–1002. [Google Scholar] [CrossRef]
- Almeida, J.; Silvestre, C.; Pascoal, A. Cooperative control of multiple surface vessels in the presence of ocean currents and parametric model uncertainty. Int. J. Robust Nonlinear Control 2010, 20, 1549–1565. [Google Scholar] [CrossRef]
- Ghabcheloo, R.; Aguiar, A.P.; Pascoal, A.; Silvestre, C.; Kaminer, I.; Hespanha, J.P. Coordinated path-following control of multiple underactuated autonomous vehicles in the presence of communication failures. In Proceedings of the 45th IEEE Conference on Decision Control, San Diego, CA, USA, 13–15 December 2006. [Google Scholar]
- Arrichiello, F.; Chiaverini, S.; Fossen, T.I. Formation control of marine surface vessels using the null-space-based behavioral control. In Group Coordination and Cooperative Control. Lecture Notes in Control and Information Science; Springer: Berlin, Germany, 2006; Volume 336. [Google Scholar]
- Balch, T.; Arkin, R.C. Behavior-based formation control for multirobot teams. IEEE Trans. Robot. Autom. 1999, 14, 926–939. [Google Scholar] [CrossRef]
- Shojaei, K. Leader–follower formation control of underactuated autonomous marine surface vehicles with limited torque. Ocean Eng. 2015, 105, 196–205. [Google Scholar] [CrossRef]
- Peng, Z.H.; Wang, D.; Chen, Z.Y.; Hu, X.J.; Lan, W.Y. Adaptive Dynamic Surface Control for Formations of Autonomous Surface Vehicles with Uncertain Dynamics. IEEE Trans. Control Syst. Technol. 2013, 21, 513–520. [Google Scholar] [CrossRef]
- Luca, C.; Fabio, M.; Domenico, P.; Mario, T. Leader-follower formation control of nonholonomic mobile robots with input constraints. Automatica 2008, 44, 1343–1349. [Google Scholar]
- Wang, Q.; Chen, Z.; Yi, Y. Adaptive coordinated tracking control for multi-robot system with directed communication topology. Int. J. Adv. Rob. Syst. 2017, 14. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R. Distributed Consensus in Multi-Vehicle Cooperative Control-Theory and Applications; Springer: Berlin, Germany, 2007. [Google Scholar]
- Fossen, T.I. Modeling of Marine Vehicles. In Guidance and Control of Ocean Vehicles; John Wiley & Sons Ltd.: Chichester, UK, 1994; pp. 6–54. ISBN 0-471-94113-1. [Google Scholar]
- Wen, G.X.; Chen, P.C.L.; Liu, Y.J.; Liu, Z. Neural-network-based adaptive leader-following consensus control of second-order nonlinear multi-agent systems. IET Control Theory Appl. 2015, 9, 1927–1934. [Google Scholar] [CrossRef]
- Wen, G.X.; Chen, P.C.L.; Liu, Y.J.; Liu, Z. Neural Network-Based Adaptive Leader-Following Consensus Control for a Class of Nonlinear Multiagent State-Delay Systems. IEEE Trans. Cybern. 2017, 47, 2151–2160. [Google Scholar] [CrossRef] [PubMed]
- Do, K.D. Robust adaptive path following of underactuated ships. Automatic 2004, 40, 929–944. [Google Scholar] [CrossRef]
- Hespanha, J.P. Internal or Lyapunov Stability. In Linear Systems Theory; Princeton University Press: Princeton, NJ, USA, 2009; pp. 63–78. ISBN 978-0-691-14021-6. [Google Scholar]












© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, K.; Fong, S.; Zhuang, Y.; Song, W. Artificial Neural Networks in Coordinated Control of Multiple Hovercrafts with Unmodeled Terms. Appl. Sci. 2018, 8, 862. https://doi.org/10.3390/app8060862
Duan K, Fong S, Zhuang Y, Song W. Artificial Neural Networks in Coordinated Control of Multiple Hovercrafts with Unmodeled Terms. Applied Sciences. 2018; 8(6):862. https://doi.org/10.3390/app8060862
Chicago/Turabian StyleDuan, Kairong, Simon Fong, Yan Zhuang, and Wei Song. 2018. "Artificial Neural Networks in Coordinated Control of Multiple Hovercrafts with Unmodeled Terms" Applied Sciences 8, no. 6: 862. https://doi.org/10.3390/app8060862
APA StyleDuan, K., Fong, S., Zhuang, Y., & Song, W. (2018). Artificial Neural Networks in Coordinated Control of Multiple Hovercrafts with Unmodeled Terms. Applied Sciences, 8(6), 862. https://doi.org/10.3390/app8060862