1. Introduction
Atomic-scale friction has been at the forefront of scientific interest over the decades. Generally, the study on the friction at atomic-scale is significant because it can result in a fundamental understanding of how friction happens as well as to facilitate the development of nanomechanical components [
1,
2,
3]. With the advent of tip-based microscopy techniques such as the lateral force microscopy (LFM) [
4], the study on atomic-scale frictional processes became accessible to researchers, and the field of nano-tribology has been set up since then [
5,
6,
7,
8]. Through the detection of torsional deflections of a cantilever as the tip is dragged over a surface, LFM can be applied to characterize the topographic and tribological features of nanomaterials [
9,
10]. The first observation of atomic-scale frictional phenomenon was reported by Mate et al. for a tungsten tip sliding on a graphite surface [
4]. By means of a LFM, they found the atomic-scale stick–slip motion of the lateral force with the periodicity of graphite’s honeycomb structure. Since then, the origin and variation of atomic-scale friction have been thoroughly explored by tribologists.
As one of the most remarkable discoveries in nano-tribology, the atomic-scale stick–slip phenomenon appears in the time domain as a series of saw-tooth signals, and its period usually corresponds to the unit cell of the surface potential [
11,
12]. This observation can be theoretically reproduced within classical mechanics by using the Prandtl–Tomlinson (PT) model, which describes the movement of a point-like tip connected to a support by a harmonic spring in constant-force mode of an idealized LFM. As the support moves at a constant speed, the tip is dragged by the spring to slide over a whole surface, while at the same time, feeling the force from a corrugated tip–surface interaction potential featuring atomic periodicity [
13,
14,
15,
16]. The stick–slip instability occurs when the tip moves through the regions where the curvature of the tip–surface interaction potential exceeds the elastic constant of the pulling spring. Otherwise, such instabilities completely vanish, and the tip exhibits a continuous, low-dissipative motion, commonly known as superlubricity [
17].
Atomically-thin laminar two-dimensional (2D) materials, such as graphene and single-layer molybdenum-disulfide (SLMoS
2), are ideal candidates suited for atomic-scale frictional studies because these materials are air-stable, chemically inert [
18], and can be easily cleaved to yield atomically flat surfaces with regular crystal structures [
19]. However, the vacancy defects, known as the most commonly reported defects in graphene [
20,
21] and SLMoS
2 [
22,
23], are inevitable during the production process and can result in considerable changes in surface morphology. So far, most experimental, theoretical, and simulation studies on the atomic-scale friction of graphene and SLMoS
2 have focused on atomically flat surfaces [
24,
25,
26,
27,
28]; nevertheless, these simplified idealizations cannot reflect the topography and frictional properties of many practical surfaces such as vacancy-defective surfaces. Molecular dynamics (MD) simulations have indicated that the frictional forces of defective graphene were significantly increased in the vicinity of vacancy point defects compared to that of the perfect graphene [
29,
30]. In the literature [
29], Sun et al. thought the atomic friction of graphene with vacancy defects was similar to the sliding at an atomic-scale surface step and attributed the sharp variations in frictional forces to additional activation barriers (commonly referred to as the Schwoebel–Ehrlich barrier [
31,
32]) caused by the reduction of the atomic coordination at the vacancy defects. However, the sliding velocity of the tip in the above MD simulations was set to 2.5 m/s for [
29] and 14.8 m/s for [
30], respectively, which is much faster than that of typical experimental LFM set-ups (at the order of 10 nm/s [
9]). Besides, the other parameters of the classical PT model, such as the effective masse of the system, the spring constant of the pulling spring, and the damping of the system, cannot be quantitatively adjusted in the MD simulation method or deduced from LFM experiments. Up to now, the effects of the PT model parameters on the atomic-scale frictional behaviors of the monovacancy-defective surface remain unclear, which hinders our understanding of the underlying mechanisms for atomic-scale frictional behaviors of defective 2D materials. As a supplement to the MD simulation and LFM experiments, the numerical approach is an efficient tool to obtain the theoretical solution of the PT model, recover the observed characteristics from the actual experiments and MD simulations, predict the results under conditions that cannot be tested experimentally and solved by MD simulations, and has been shown to accurately describe the frictional properties at atomic-scale surface steps [
33,
34].
In this work, we employ a novel numerical simulation method to explore the atomic-scale frictional properties of the monovacancy-defective graphene and SLMoS2. A modified interaction potential considering the Schwoebel–Ehrlich barrier is developed for the tip-defective surface interaction potential of the PT model. To study the mechanisms that control the frictional characteristics of the graphene and SLMoS2 with vacancy defects, we changed the effective masse of the system, the damping of the system, the sliding velocity of the tip, and the spring constant of the pulling spring to examine how the atomic-scale frictional behaviors depend on these variables. Ours is the first study revealing the influences of the classical PT model parameters on the atomic-scale frictional properties of a monovacancy-defective surface, and this work can make up for the deficiency of the LFM experiments and MD simulations when studying the atomic-scale frictional behaviors of 2D materials with vacancy-related defects.
2. Simulation Model and Method
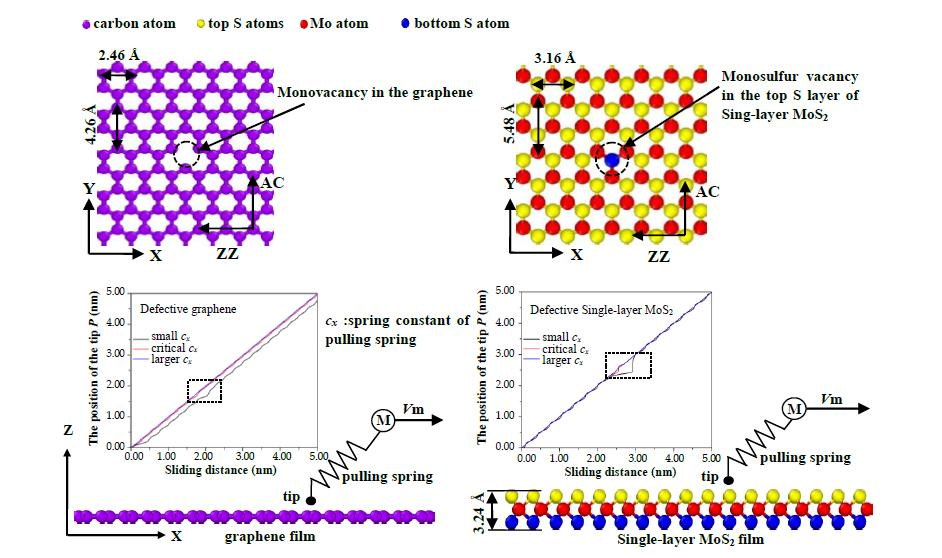
Graphene consists of an isotropic hexagonal honeycomb lattice of carbon atoms. SLMoS
2 consists of a 2D hexagonal honeycomb lattice where the Mo layer is covalently sandwiched between the bottom S layer and the top S layer. The vertical distance between two S layers of SLMoS
2 is approximately 3.24 Å. The atomistic models of monovacancy-defective graphene and SLMoS
2 are achieved by constructing a defect-free monolayer film first and then introducing the monovacancy defect in the center of the surface/top layer, as shown in the inserts in
Figure 1a,b. In the adopted Cartesian coordinate system, the X-axis is set along the zigzag (ZZ) direction, the Y-axis along the armchair (AC) direction, and the Z-axis normal to the graphene and SLMoS
2. The sliding was applied by moving the tip along the zigzag (ZZ) on the center line of the monovacancy-defective graphene and SLMoS
2. The areas of the graphene and SLMoS
2 film were 76.26 × 62.48 Å
2 and 166.23 × 142.59 Å
2 in the X–Y plane, respectively. The single-atom tip was generated for the atomic-scale friction according to the PT model, which consisted of a single carbon atom and was set as a rigid body in order to avoid the mass loss caused by the tip wear during the atomic-scale friction process. The constant-force mode is applied in the model and the loading force on the tip is kept at 2.5 nN. The schematic diagrams of the atomic-scale friction of monovacancy-defective graphene and SLMoS
2 are shown in
Figure 1a,b, respectively.
In the atomic-scale friction process, stick–slip behaviors can be explained by the classical PT model, which simplifies the single-asperity friction into one point-mass (tip) pulled along a corrugated potential by a driving support (spring) [
16]. The classical PT model is shown as follows:
where
cx and
cy represent the spring constants of the pulling spring,
mx and
my represent the effective masses of the system,
xt and
yt represent the actual positions of the tip,
xM =
yM =
Vmt represent the equilibrium positions of the tip without potential,
Vm represents the sliding velocity of the tip,
Vint (
xt,
yt) represents the tip–surface interaction potential,
γx and
γy represent the damping of the system. The frictional forces
Fx =
cx (
xM −
xt) and
Fy =
cy (
yM −
yt) of the PT model are composed of a dissipative part and a conservative part, which are given by the damping term and the tip–surface interaction potential, respectively [
15]. Theoretically, the degree of freedom for the atomic motions is high in 2D systems where the non-adiabatic motion is avoided [
28]. In the PT model, the sweeping of the tip can be regarded as adiabatic.
The tip–surface interaction potential of the classical PT model in Equation (1) is governed by the corrugated potential
Vint (
xt,
yt), which can be described as
where
V0 represents the initial value of tip-sample interaction,
ax and
ay represent the sample’s lattice constants in the ZZ and AC orientation, respectively. In the ZZ orientation,
ax is 2.46 and 3.16 Å for graphene and SLMoS
2, respectively.
In order to quantify the tip–surface interaction potential, the Lennard–Jones (LJ) potential
VLJ, which has been used to accurately describe the frictional properties at atomic-scale steps [
33,
34], is taken into consideration as the tip–surface potential in the case of the single-atom tip crossing the monovacancy defects of graphene and SLMoS
2. The
VLJ can be described as follows:
where
ri represents the distance between the
ith surface atom and the tip,
r0 and
E0 represent the equilibrium distance and the binding energy, respectively.
In the presence of the vacancy defects, the surface state is similar to that of the atomic-scale surface steps. According to previous LFM studies on the monovacancy-defective graphene [
29,
30] and the stepped surfaces [
34,
35,
36,
37,
38], there is the Schwoebel–Ehrlich barrier existing in the vicinity of the vacancy defect, and hence the long-range interactions
Vlong are varying, which means a second contribution to the tip–surface interaction potential should be considered. A modified interaction potential
Vtotal containing the periodic interaction
Vint (
xt,
yt) between the tip and surface as well as the sharply increasing potential barrier at the vacancy defect site simulating the long-range interaction potential
Vlong is constructed to reflect the tip–surface interaction of the defective graphene and SLMoS
2 with monovacancy defects, which is shown as follows:
The long-range interaction potential
Vlong can be described by the model [
33,
37,
38] based on the approximate low-load analytical form of the Schwoebel–Ehrlich barrier in the vicinity of the atomic-scale surface step. The
Vlong is shown as follows:
where
E represents a constant of the order of an electronvolt,
b1 represents the effective barrier width at the vacancy defect site,
b2,
c, and
d are the constants representing a recovery of the potential away from the vacancy defect.
In order to obtain the numerical description of the frictional force
Fx in the PT model, we develop the modified interaction potential
Vtotal by fitting the LJ potential curve and set it as the approximate tip–surface interaction potential of the monovacancy-defective graphene and SLMoS
2. Relevant parameters for the LJ potential
VLJ and the long-range interaction
Vlong are shown in
Tables S1 and S2 in the supporting materials, respectively. The simulations of the atomic-scale frictional behaviors in our work are performed by using the software Mathematica (Wolfram Research, Champaign, IL, USA, version 12).
3. Results and Discussions
We first calculate the tip–surface interaction potential by LJ potential (VLJ) and then develop the modified interaction potential (Vtotal) through fitting the LJ potential (VLJ). By introducing the potential Vtota into Equation (1), we can calculate the path of the tip on the sample surface and obtain the frictional forces. Finally, we discuss the effects of the parameters (the effective mass of the system m, damping of the system γ, sliding velocity Vm, and spring constant of the pulling spring c) of the classical PT model on the frictional force and the stick-slip behaviors of monovacancy-defective graphene and SLMoS2.
Figure 2a,b shows the tip–surface potential
Pt versus the sliding distance
D curves when the tip moves over the vacancy defect at the surface of the defective graphene and SLMoS
2, respectively. The corresponding frictional force
Fx versus the sliding distance
D curves are shown in
Figure 2c,d, respectively. The typical parameters of LFM experiments [
15,
28,
39] are set as follows:
mx =
my = 10
−8 kg,
cx =
cy = 10 N/m,
V0 = 1.0 eV, and
Vm = 40 nm/s. The damping of the system can be obtained with
γx = γy = 2 (
cx mx)
1/2 ≈ 10
−3 N·s/m. Owing to the presence of the monovacancy defect, the changes in the tip–surface potential and frictional force of the monovacancy-defective graphene and SLMoS
2 can be clearly observed. There are the large positive tip–surface potential and frictional force occurring when the tip approaches the vacancy, indicating the attraction from the vacancy. After passing the vacancy, the tip feels a large attractive force from the vacancy again. The enhanced frictional force in the vicinity of the vacancy defect is in agreement with that in the previous works about the monovacancy-defective graphene [
29,
30], and the sharp variations in tip–surface potentials and frictional forces can be attributed to the Schwoebel–Ehrlich barriers [
31,
32], which have been already observed in the friction at the atomic-scale surface steps of graphene [
34,
35,
36,
38] and MoS
2 [
37].
In order to explore the stick–slip motions during the frictional process of the monovacancy-defective graphene and SLMoS
2, we plot the position of the single-atom tip versus the sliding distance curves, as illustrated in
Figure 2e,f. It indicates that the stick–slip motion is absent for the friction of the monovacancy-defective graphene, while the obvious stick–slip motion appears in the vicinity of vacancy defect of monovacancy-defective SLMoS
2. It can be attributed to the difference in the curvature of the tip–surface interaction
V″ (or the critical elastic constant
cx) at the vacancy defect site of defective graphene and SLMoS
2 (
V″
carbon = 0.91 for the monovacancy-defective graphene and
V″
SLMoS2 = 17.18 for the monovacancy-defective SLMoS
2) because the stick–slip phenomenon occurs on condition that the elastic constant
cx of the pulling spring (
cx = 10 N/m,
cx >
V″
carbon, and
cx <
V″
SLMoS2) should be less than or equal to the curvature of the tip–surface interaction potential
V″ [
17,
34]. Besides, although there is no stick–slip motion for the monovacancy-defective graphene, the single-atom tip does undergo periodical acceleration–deceleration motion without a full stick, which is similar to the stick–slip motion, and in accord with previous studies of defective graphene [
30].
3.1. Variation of the Effective Masses mx of the System
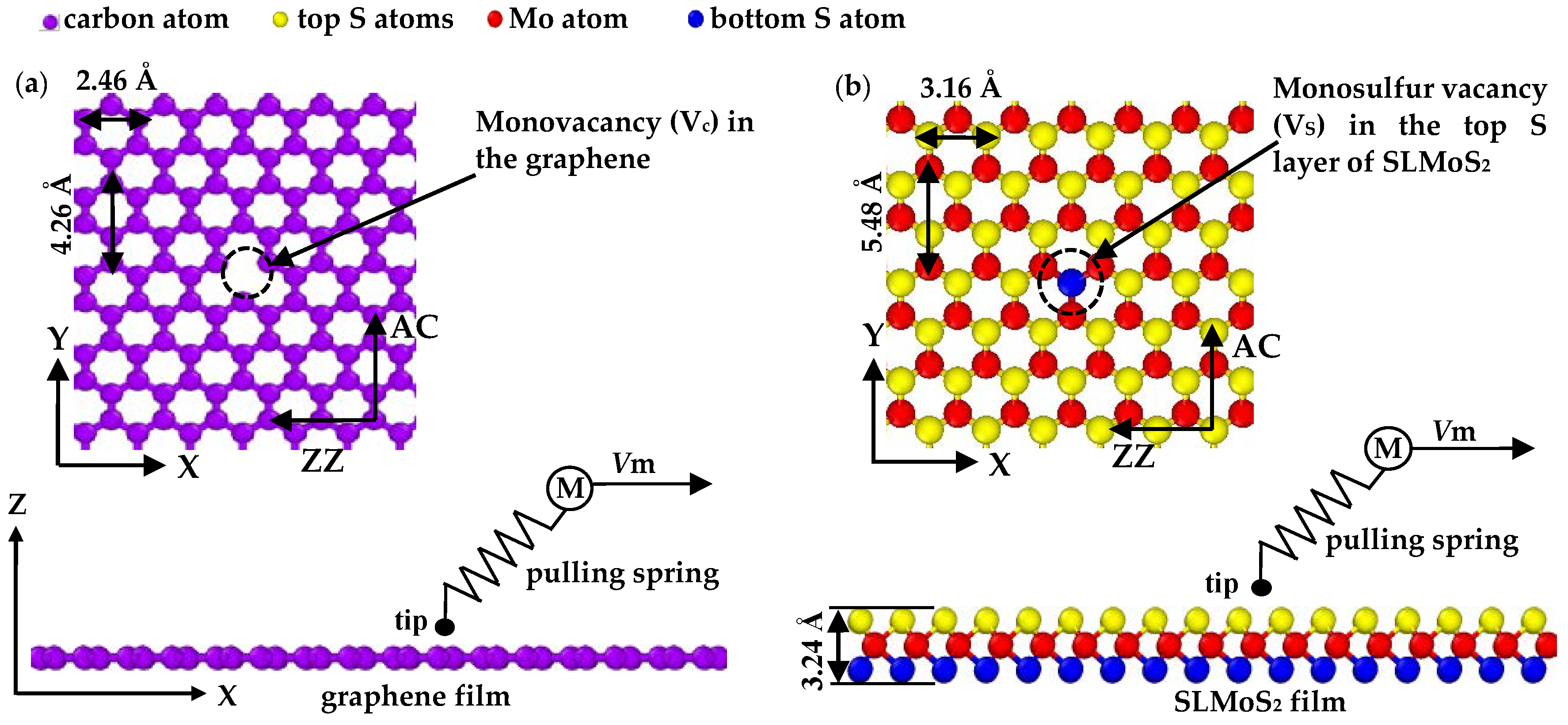
The relations of the frictional force
Fx vs. the sliding distance
D for four effective masses
mx of the system (namely,
mx = 10
−10, 5 × 10
−9, 3 × 10
−8, and 12 × 10
−8 kg) are shown in
Figure 3a,b. The
cx,
Vm, and
γx are set to 10 N/m, 40 nm/s, and 10
−3 N·s/m, respectively. It is seen that all the
Fx-
D curves of the monovacancy-defective graphene are almost the same, as shown in
Figure 3a. For the monovacancy-defective SLMoS
2, however, the amplitude of the minimum frictional force
Fxmin increases with
mx (namely, the amplitude of
Fxmin is 0.465, 0.468, 0.605, and 1.040 nN for
mx = 10
−10, 5 × 10
−9, 3 × 10
−8, and 12 × 10
−8 kg, respectively), and the other frictional forces including the maximum frictional force
Fxmax and the periodic frictional forces (namely, the frictional forces except for that in the vicinity of the vacancy defect) remain basically unchanged, as shown in
Figure 3b.
The relations of the position of the single-atom tip
P vs. the sliding distance
D for the above four effective masses
mx of the system are shown in
Figure 3c,d. It can be seen that there is virtually no change in the
P vs.
D curves of the monovacancy-defective graphene and SLMoS
2 with different
mx, which means the stick–slip motion in the vicinity of the vacancy defect is nearly independent of the effective masses
mx of the system.
3.2. Variation of the Damping γx of the System
The relations of the frictional force
Fx vs. the sliding distance
D for four different dampings
γx of the system (namely,
γx = 8 × 10
−5, 4 × 10
−4, 2 × 10
−3, and 10
−2 N·s/m) are shown in
Figure 4a,b. The
cx,
Vm, and
mx are set to 10 N/m, 40 nm/s, and 10
−8 kg, respectively. The results show that the frictional forces
Fx of the monovacancy-defective graphene and SLMoS
2 increase with the damping
γx. It can be explained by Equation (1) that the frictional force
Fx =
cx (
xM −
xt) =
is positively correlated with the damping
γx, which is in agreement with the definition of the frictional force in the PT model [
15]. However, the amplitudes of the frictional forces including the enhanced frictional forces in the vicinity of the vacancy defect and the periodic frictional forces of the monovacancy-defective graphene and SLMoS
2 increase with decreasing
γx, as shown in
Supplementary Figure S1a,b. This negative correlation between the amplitude of the frictional force and the damping
γx is in accord with the physical meaning of the damping term in the PT model, namely, the term considering the mechanisms of the energy dissipation in atomic-scale friction [
15,
16].
The relations of the position of the single-atom tip
P vs. the sliding distance
D for the above four dampings
γx of the system are shown in
Figure 4c,d. The results show that the
P vs.
D curves of the monovacancy-defective graphene with different
γx are coincident, and this trend is similar to that of the monovacancy-defective SLMoS
2 except for a little shift in the stick–slip regime at the defect position for the case of
γx = 10
−2 N·s/m. It indicates that the damping
γx of the system has little effect on the stick–slip motions in the vicinity of the vacancy defect.
3.3. Variation of the Sliding Velocity Vm
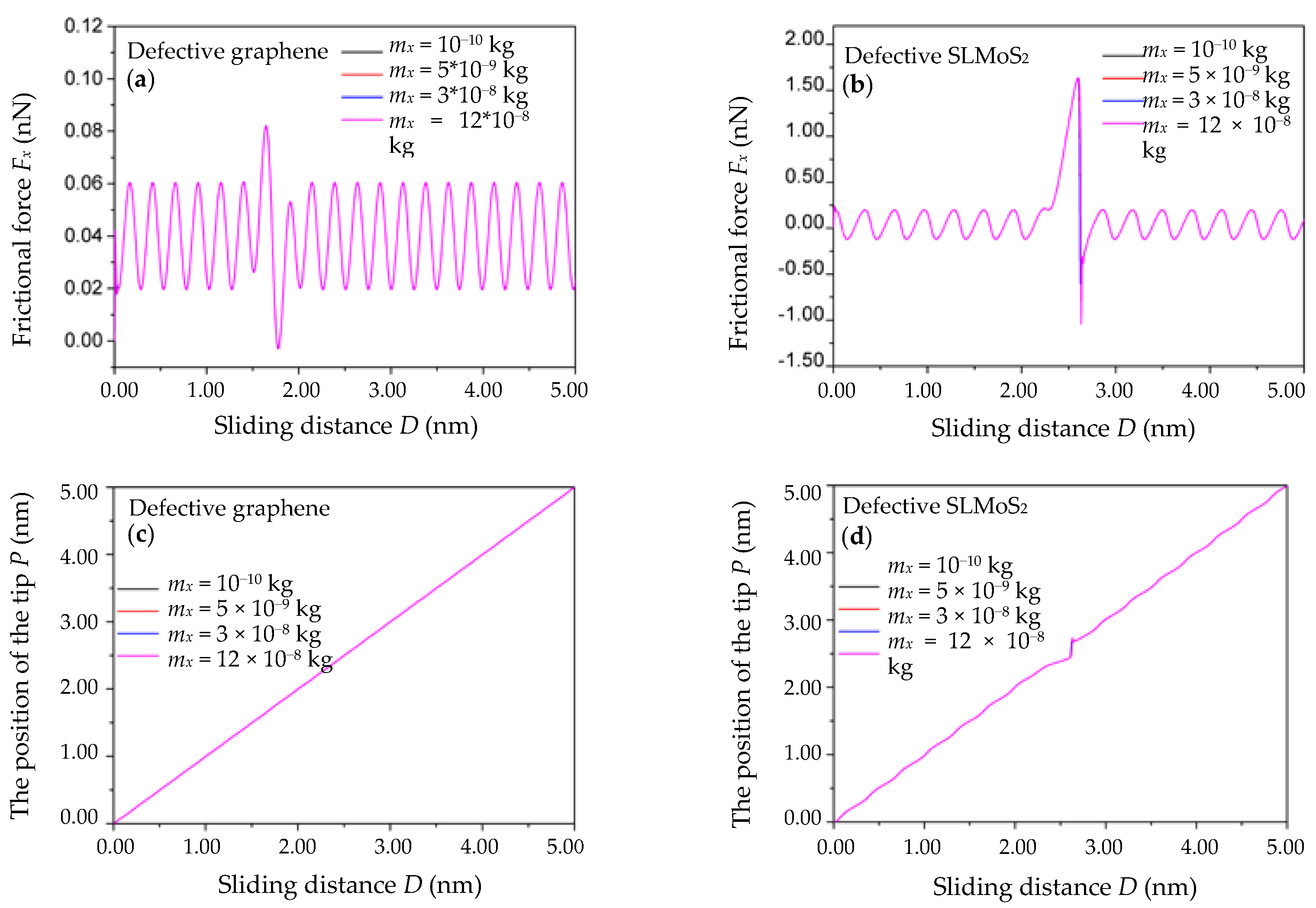
Figure 5a,b shows the relations of the frictional force
Fx versus the sliding distance for five different sliding velocities
Vm (namely,
Vm = 2, 15, 60, and 150 nm/s). The
γx,
cx, and
mx are set to 10
−3 N·s/m, 10 N/m, and 10
−8 kg, respectively. It is seen that the frictional forces of the monovacancy-defective graphene and SLMoS
2 increase with the
Vm. The result can be explained by Equation (1) that the atomic-scale frictional force
Fx =
cx (
xM −
xt) =
cx (
Vmt −
xt) [
15,
34] is positively correlated with the sliding velocity
Vm, which has been demonstrated in previous work [
40]. Besides, the amplitudes of the frictional forces including the enhanced frictional forces in the vicinity of the vacancy defect and the periodic frictional forces of the monovacancy-defective graphene and SLMoS
2 almost keep constant at different sliding velocities
Vm.
The relations of the position of the single-atom tip
P vs. the sliding distance
D for the above four sliding velocities
Vm are shown in
Figure 5c,d. Similar to the trends of
mx and
γx, the variations in the
P vs.
D curves of the monovacancy-defective graphene and SLMoS
2 with different
Vm are extremely small and can be neglected, which indicates that the stick–slip motion in the vicinity of the vacancy defect is approximately independent of the sliding velocity
Vm. The result seems to contradict previous studies suggesting that stick–slip motions can also be suppressed or even ruined by thermally activated jumps when the tip scans at a low velocity [
41,
42]. Nevertheless, this is because the temperature was not considered for the classical PT model in this work, and hence the resulting thermally activated fluctuations of the friction behaviors were not observed. We expect the effect of the temperature on the atomic-scale frictional properties of defective 2D materials to be systematically studied in future works.
3.4. Variation of the Spring Constants cx of the Pulling Spring
Due to the great difference in the critical spring constants
cx (the curvature of the tip–surface interaction potential) of the monovacancy-defective graphene and SLMoS
2 in this work (the critical
cx is 0.91 and 17.18 N/m for the monovacancy-defective graphene and SLMoS
2, respectively, as calculated in the beginning of
Section 3), it is reasonable to set three different
cx which are based on their respective critical values
cx and separated by a amplitude of 5 times. Specifically, the small spring constants
cx, the critical spring constants
cx, and the larger spring constants
cx of the monovacancy-defective graphene are set to 0.18, 0.91, and 4.55 N/m, respectively. The small spring constants
cx, the critical spring constants
cx, and the larger spring constants
cx of the monovacancy-defective SLMoS
2 are set to 3.44, 17.18, and 85.9 N/m, respectively.
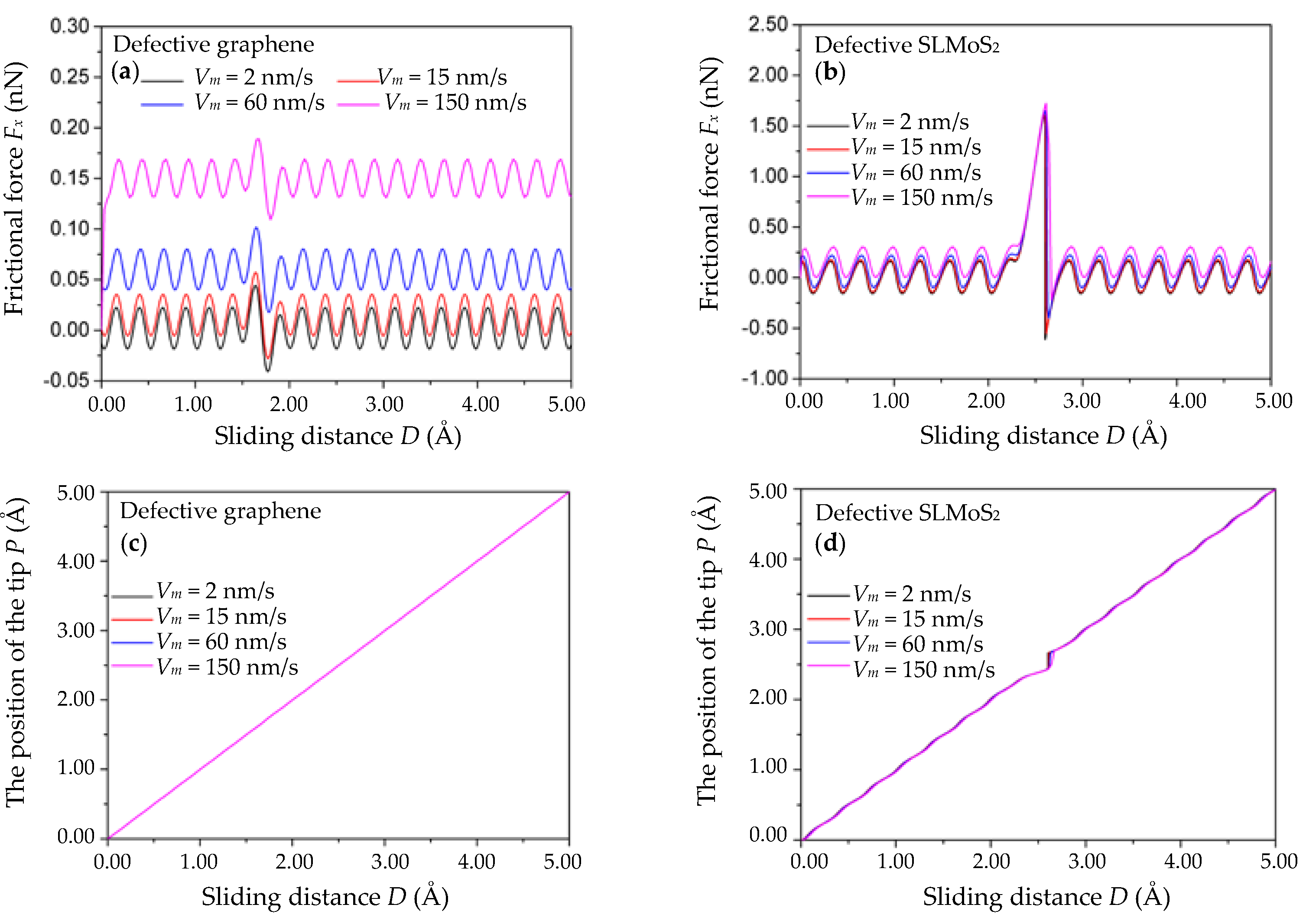
Figure 6a,b show the relations of the frictional force
Fx versus the sliding distance for the three different spring constants
cx of the pulling spring. The
γx,
Vm, and
mx are set to 10
−3 N·s/m, 40 nm/s, and 10
−8 kg, respectively. It is seen that the amplitudes of the frictional forces of the monovacancy-defective graphene and SLMoS
2 increase with the spring constants
c. However, the details of the observed variations in the frictional forces of two materials are distinctly different. For the monovacancy-defective graphene, all the frictional forces including the enhanced frictional forces in the vicinity of the vacancy defect and the periodic frictional forces are positively correlated with the spring constants
cx. For the monovacancy-defective SLMoS
2, the maximum frictional force
Fxmax and the periodic frictional forces almost keep constant at different
cx while the amplitude of the minimum frictional force
Fxmin in the vicinity of vacancy point defects increases with the
cx.
The relations of the position of the single-atom tip
P vs. the sliding distance
D for the above three spring constants
cx are shown in
Figure 6c,d. It is observed that when the
cx of the monovacancy-defective graphene and SLMoS
2 are less than or equal to the critical value, the stick–slip behaviors occur and become more obvious as the spring constants
cx decrease (the black and red wavy lines in
Figure 6c,d). Otherwise, the stick–slip behaviors disappear completely (the blue lines in
Figure 6c,d). The results are in agreement with previous studies [
15,
17,
34,
43]. In addition, it is noted that the stick–slip behaviors in the vicinity of the vacancy defect of the monovacancy-defective SLMoS
2 are much more obvious than that of the monovacancy-defective graphene when their respective spring constants
cx are equal to or a fifth of the critical
cx (see the dotted boxes in
Figure 6c,d). It indicates that it is more sensitive to the stick–slip motion at the vacancy defect site for the monovacancy-defective SLMoS
2 than that for the monovacancy-defective graphene, which can be due to the more complicated three-layer-sandwiched atomic structure of SLMoS
2. It is worth noting that SLMoS
2 [
22] can be charged, which may influence the stick–slip motions around the vacancy defect. However, the interaction between the LFM tip and the SLMoS
2 with the charged state of the vacancy defect remains unclear so far, and we expect this issue will be deeply studied in future works. Besides, the influence of the chirality on the atomic-scale friction of monovacancy-defective 2D graphene and SLMoS
2 is also explored, and the results suggest that the variation trends of the stick–slip behaviors and the frictional forces along the AC orientation are similar to that along the ZZ orientation, as shown in
Supplementary Figures S2 and S3. Compared with the other parameters of the classical PT model (the effective masse of the system
mx, damping of the system
γx, and sliding velocity
Vm), the spring constant of the pulling spring
cx has the most remarkable impact on the stick–slip motion in the vicinity of the vacancy defect, which suggests that the soft tip with small spring constant can be suitable for the observation of the stick–slip motions in the atomic-scale friction experiments of the monovacancy-defective 2D materials. Otherwise, the stiff tip with larger spring constant can be suitable for the observation of the low-dissipative motions or the superlubricity phenomena in the atomic-scale friction experiments of the monovacancy-defective 2D materials.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





