Numerical and Experimental Study on Waviness Mechanical Seal of Reactor Coolant Pump



Abstract
:1. Introduction
2. Numerical Analysis
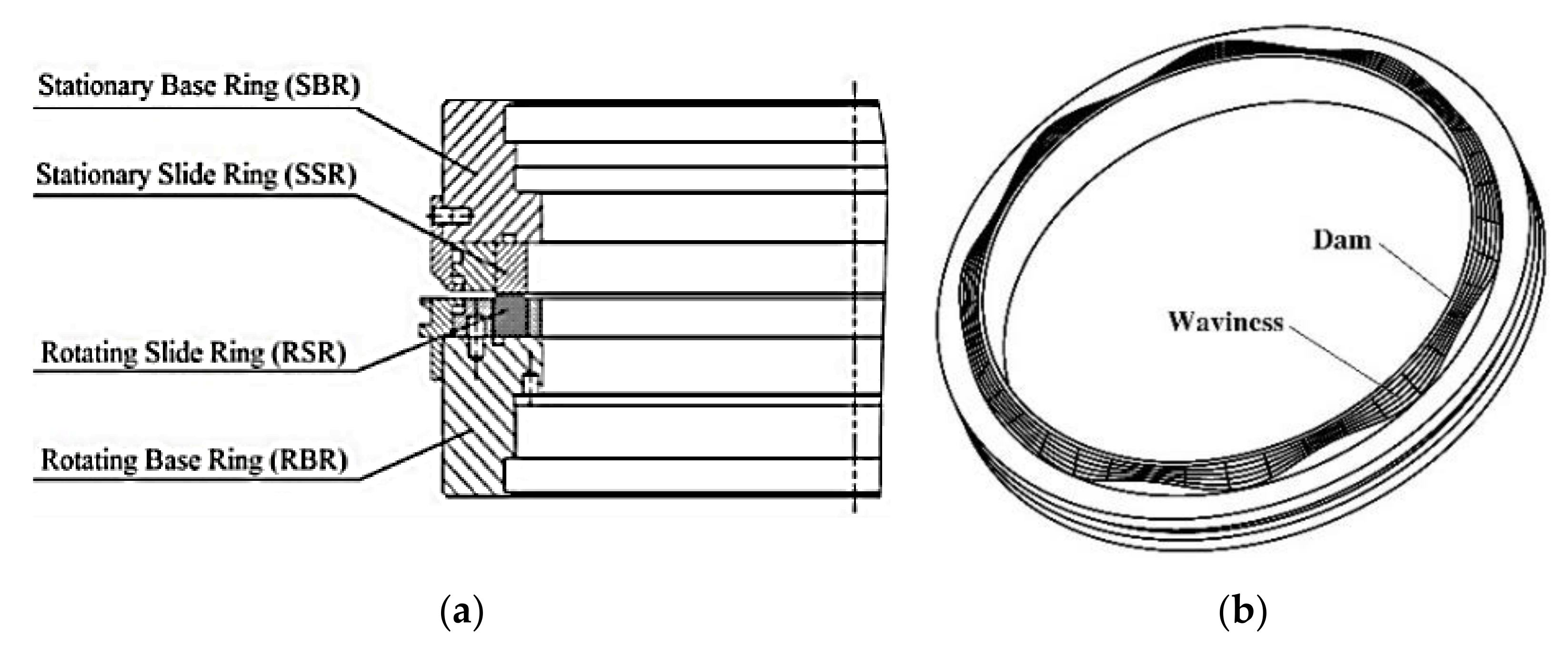
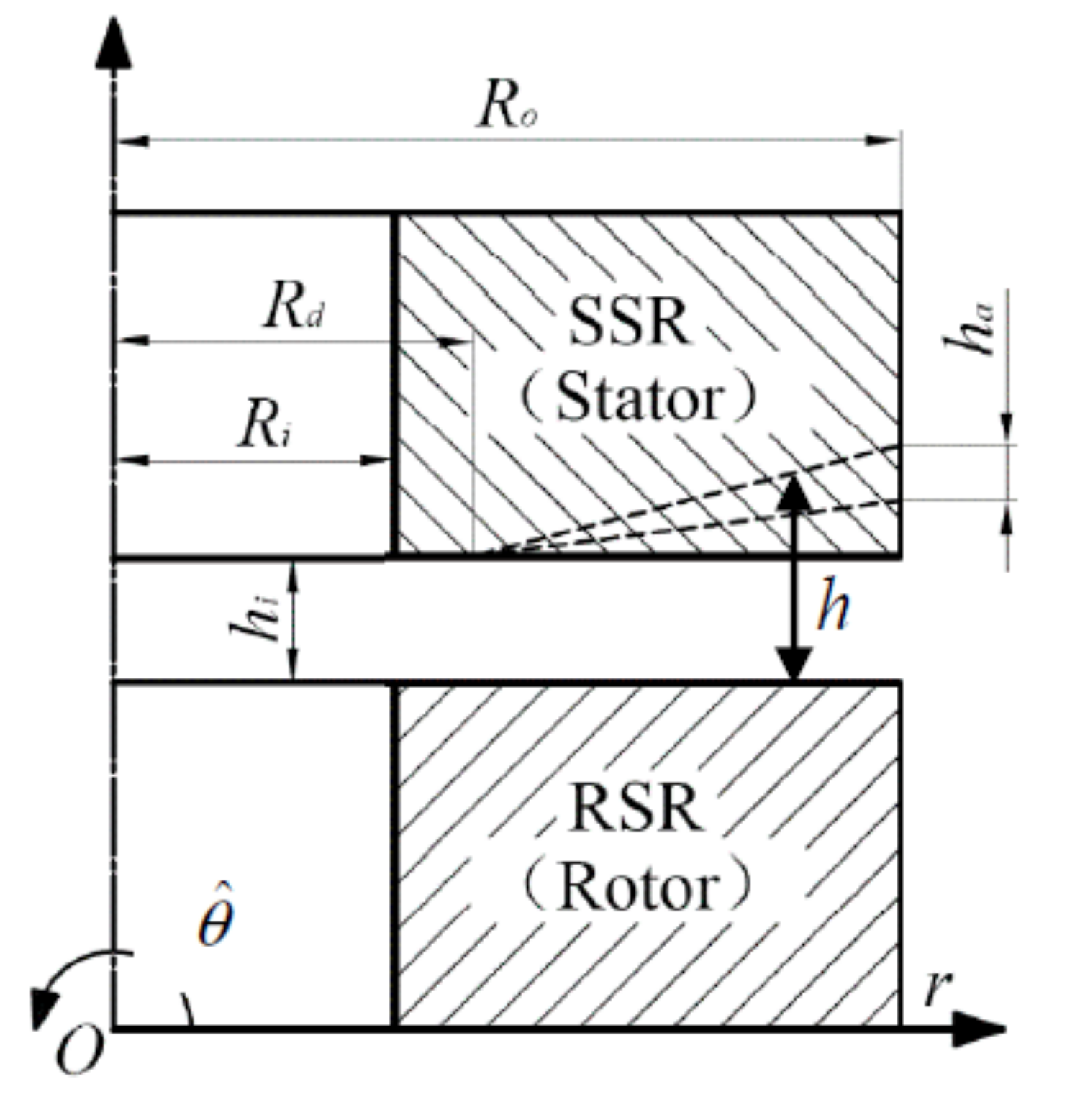
2.1. Geometric Model
2.2. Mathematical Model
- The lubrication film between is the Newtonian fluid, and the flow is laminar flow. Since the working fluid of the mechanical seal is always the water, the assumption of Newtonian fluid is reasonable, and since the velocity of working fluid is small enough, the assumption of laminar flow also is reasonable.
- The heat generation of the viscous shear is ignored, and the liquid film viscosity is considered to be constant. Since the heat generation of the viscous shear is very low and the temperature of the liquid film is basically constant, this assumption is reasonable.
- The pressure variation along the direction of the film thickness is not considered. This is the basic assumption of Reynolds equation.
2.3. Calculating Results and Analysis
3. Experimental Research
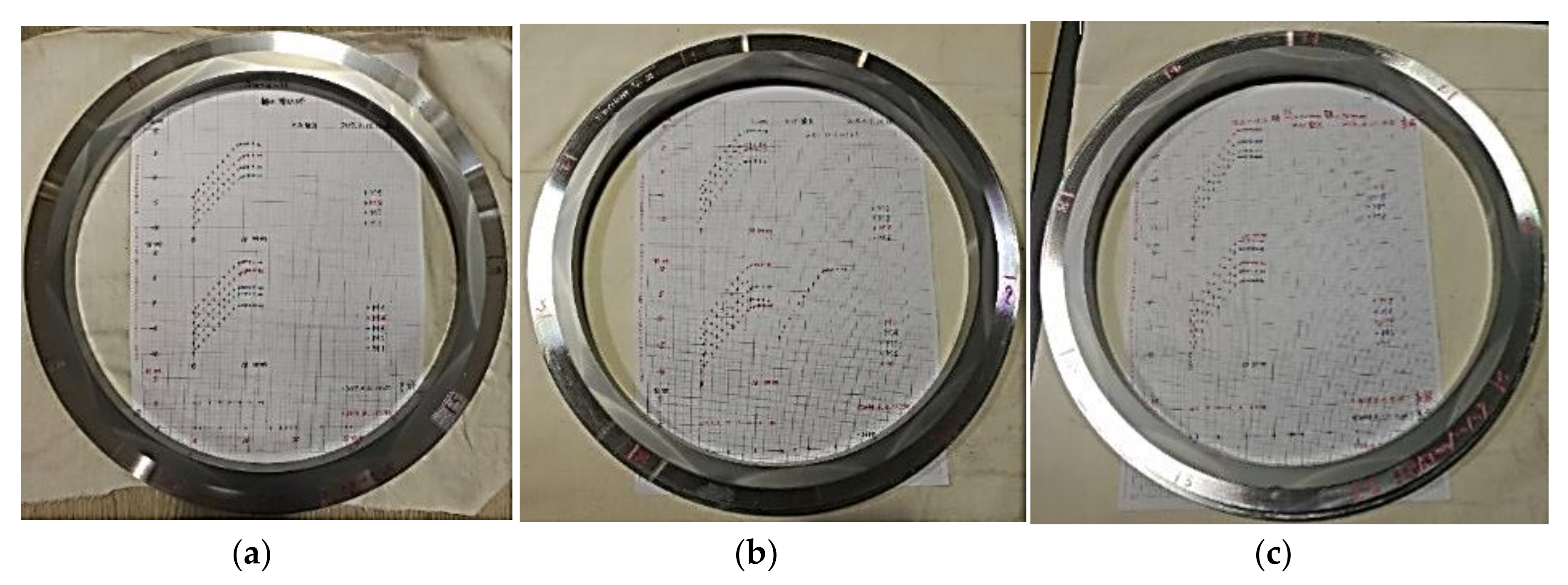
3.1. Manufacture and Experiment of the Sealing Rings
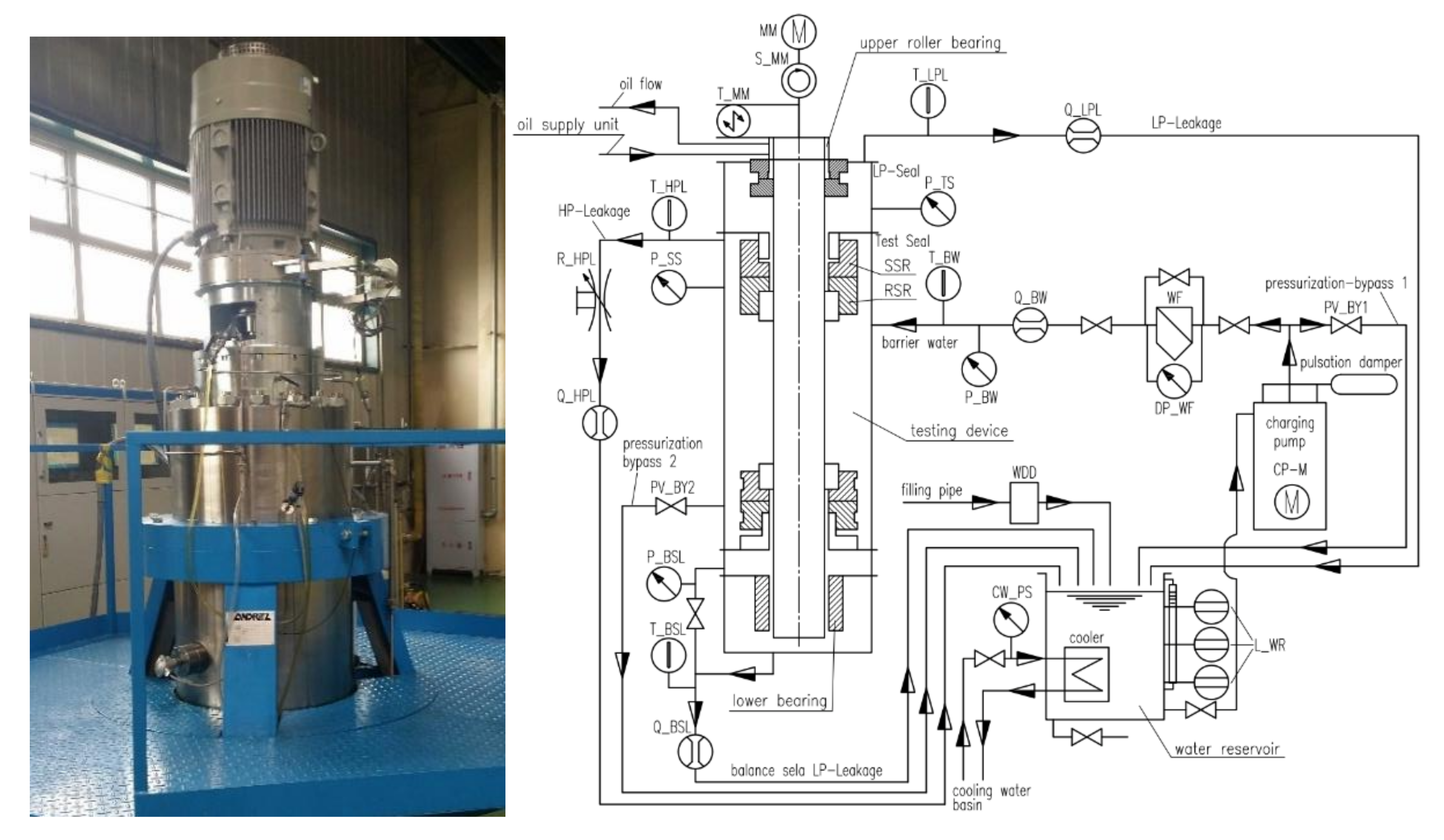
3.2. Performance Test
3.3. Test Comparative Analysis
4. Comparisons of Test and Simulation Results
5. Conclusions
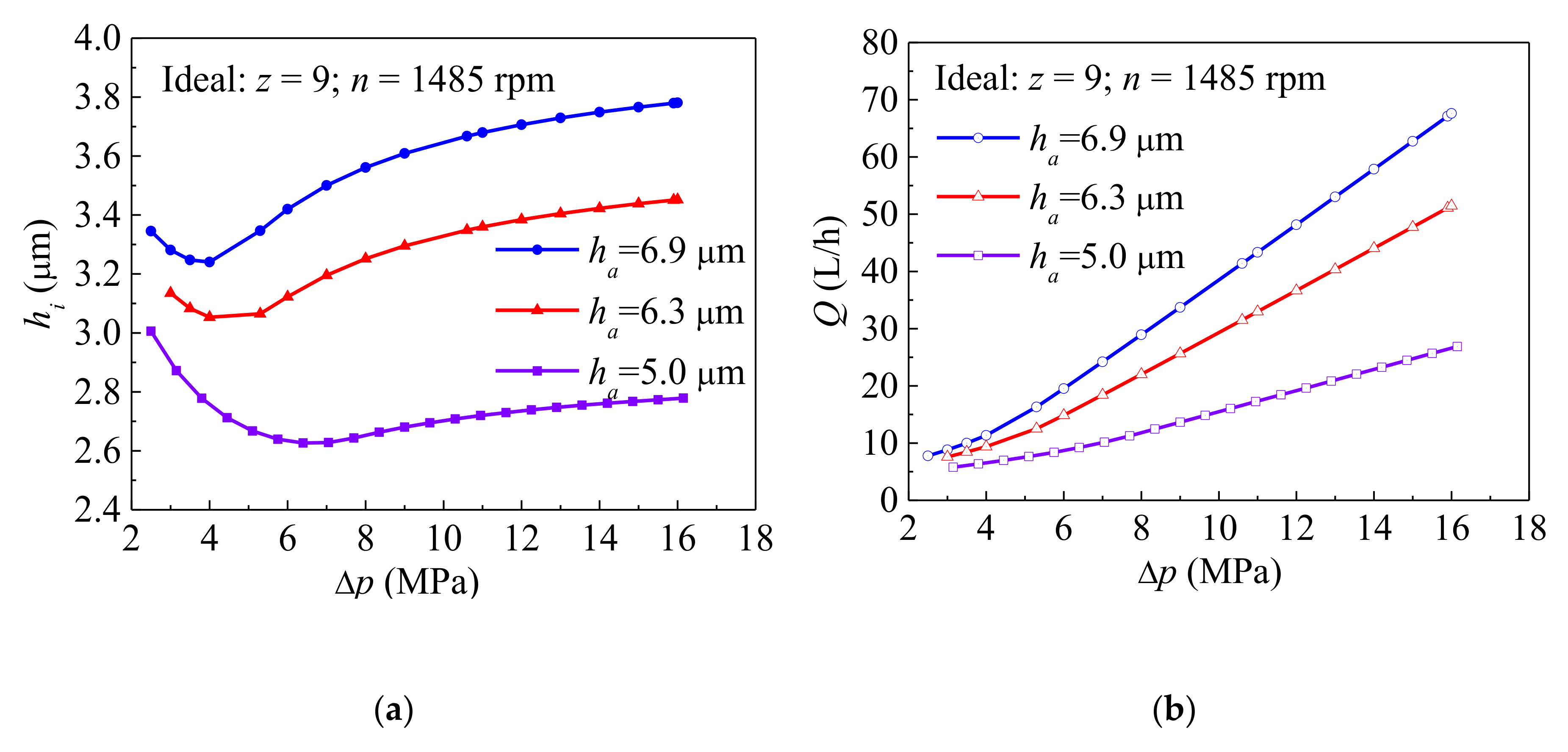
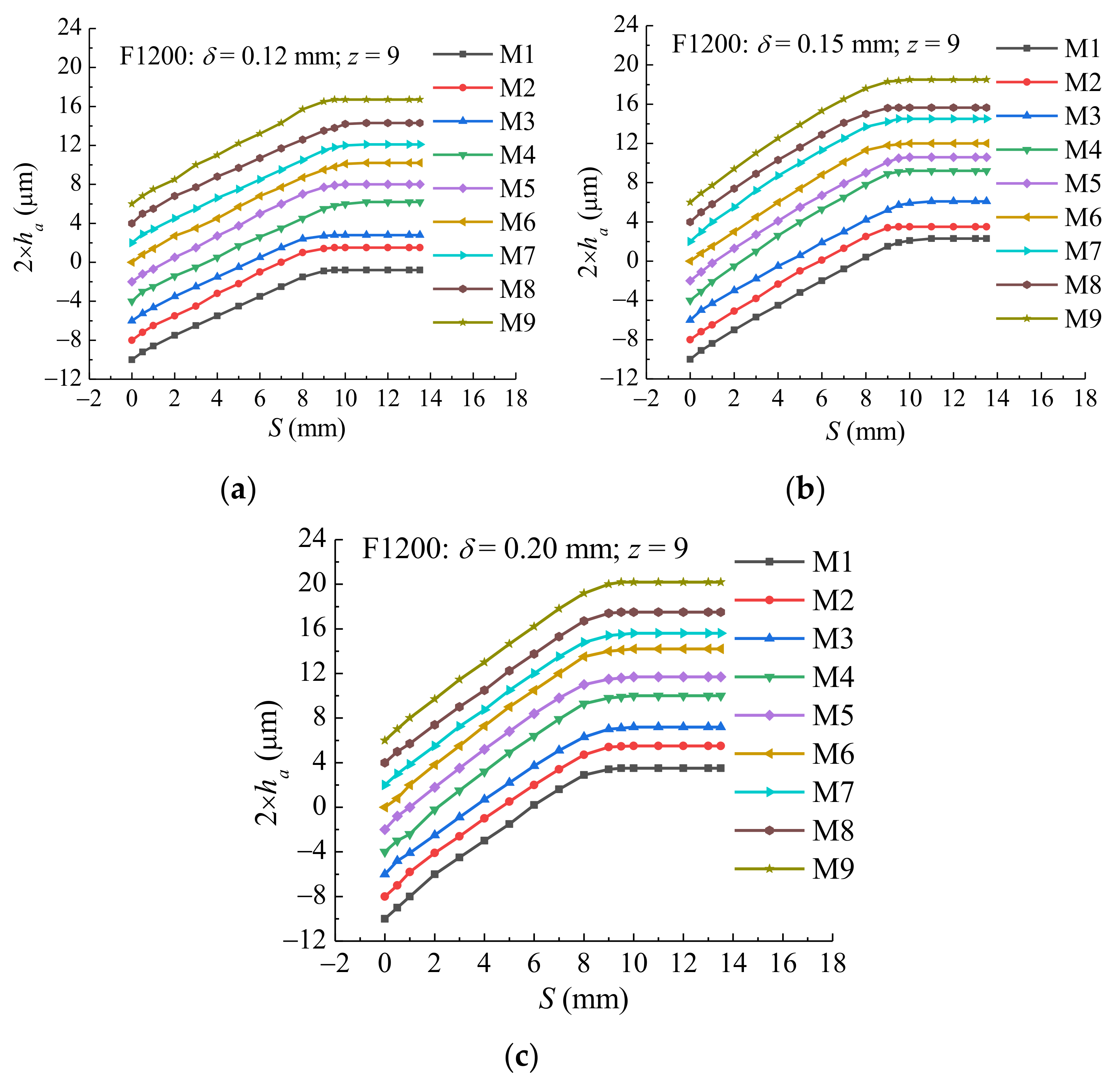
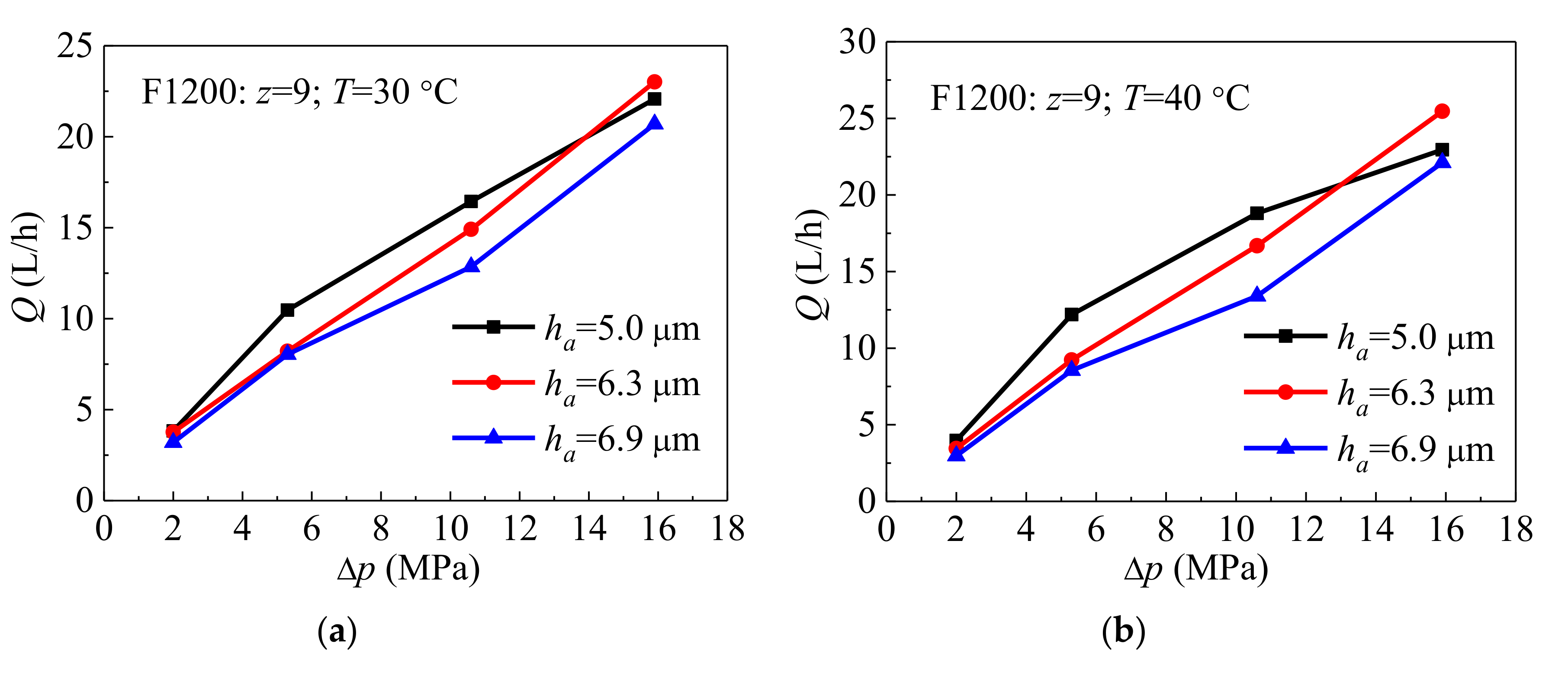
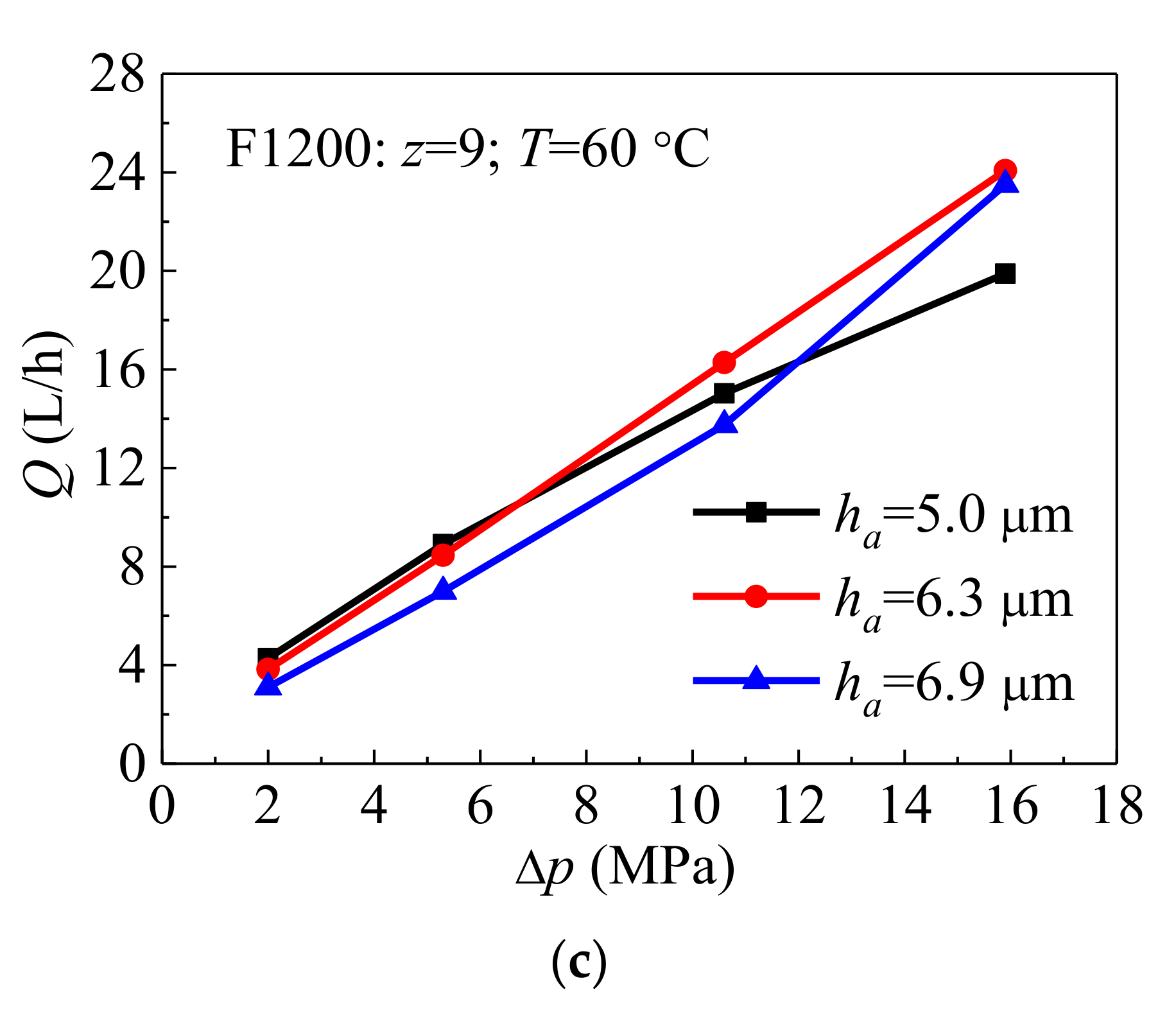
- The calculated results show that when the waviness amplitude is constant, the leakage rate increases linearly with the increase of the pressure. The minimum liquid film thickness decreases first and then increases with the decrease of the pressure. There is a minimum limit value due to the phenomenon of liquid film cavitation. The larger waviness amplitude led to the smaller thickness of the liquid film and the larger leakage rate under the same pressure.
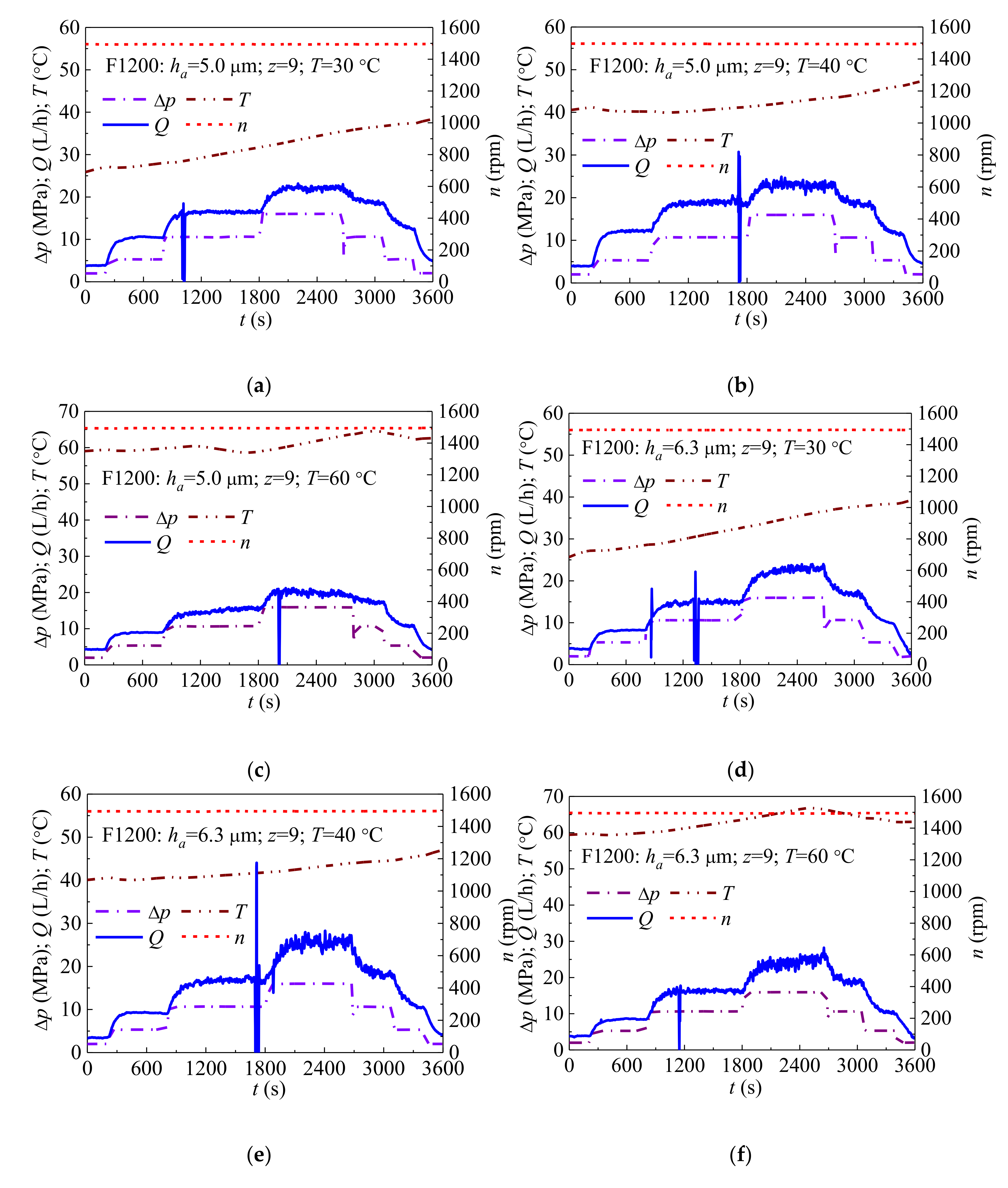
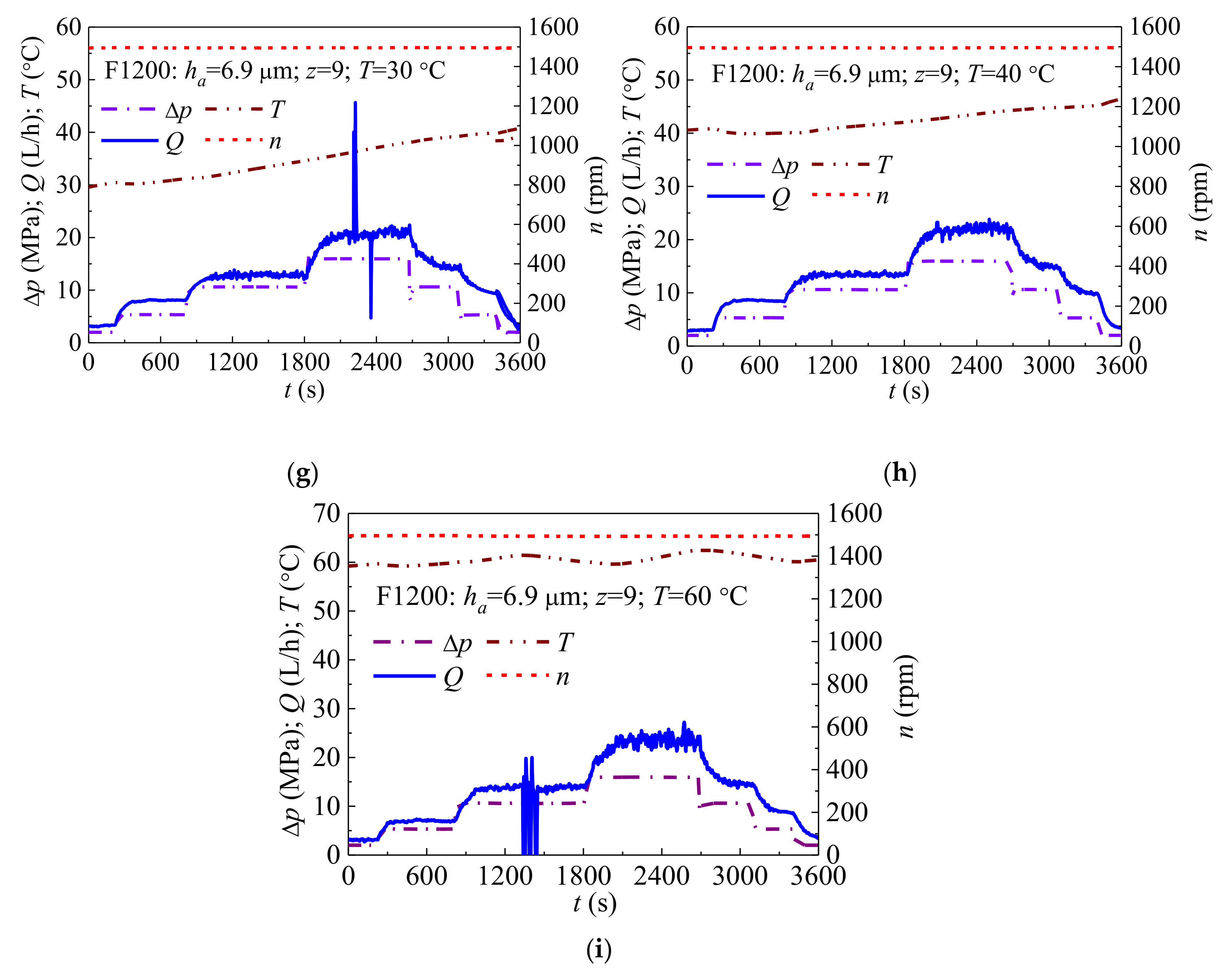
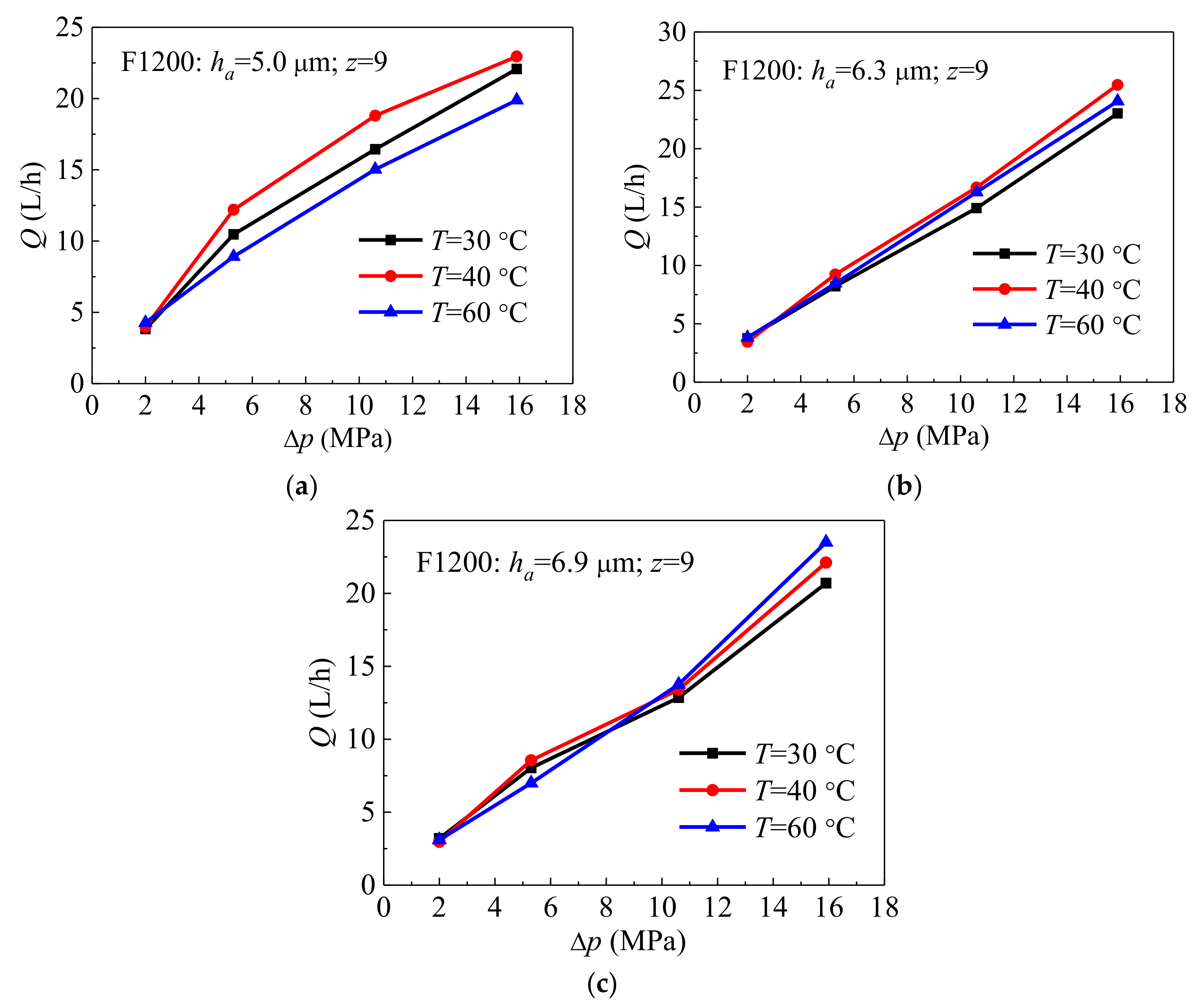
- The test results show that the leakage rate is basically stable under the steady-state conditions and increases with pressure. The sealing performance is superior during the step-up and step-down processes of the pressure, and the seal ring does not lock up, which indicates the operation stability of the waviness end face seal.
- The test pressure, temperature and waviness amplitude have important effects on the leakage rate of the mechanical seal. The effect of the sealing pressure is the largest, and the influence of the temperature and waviness amplitude is not obvious, which is caused by the complex thermo-mechanic coupling effect of the mosaic for the rotating and stationary slide ring, and the inconsistency of the temperature control during the test.
- The calculated value of the leakage rate is greater than the measured value, which indicates that the thermo-mechanics coupling effect of the rotating and stationary slide rings for the mechanical seal cannot be ignored. The accurate calculation of the thermal deformation of the seal waviness end face is very important for the prediction of the leakage rate. The waviness mechanical seal needs to be further developed by multi-physics coupling modelling analysis.
Author Contributions
Funding
Conflicts of Interest
References
- Allaire, P.E. Noncontacting Face Seals for Nuclear Applications—A Literature Review. Lubr. Eng. 1984, 40, 344–351. [Google Scholar]
- Hu, S.T.; Huang, W.F.; Liu, X.F.; Wang, Y.M. Influence Analysis of Secondary O-ring Seals in Dynamic Behavior of Spiral Groove Gas Face Seals. Chin. J. Mech. Eng. 2016, 29, 507–514. [Google Scholar]
- Wang, Y.; Sun, J.J.; Tao, K.; Ma, C.B.; Tu, Q.A. Numerical Analysis of T-groove Dry Gas Seal and Groove Optimization. Tribology 2014, 34, 420–427. [Google Scholar]
- Iny, E.H. A Theory of Sealing with Radial Face Seals. Wear 1971, 18, 51–69. [Google Scholar]
- Cochain, J. Numerical and Experimental Study of Misaligned and Wavy Mechanical Face Seals Operating under Pressure Pulses and Pressure Inversions. Ph.D. Thesis, Université de Poitiers, Poitiers, France, 2018. [Google Scholar]
- Cochain, J.; Brunetière, N.; Parry, A.; Denoix, H.; Maoui, A. Experimental and Numerical Study of Wavy Mechanical Face Seals Operating under Pressure Inversions. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2020, 234, 247–260. [Google Scholar]
- Shen, M.X.; Peng, X.D.; Meng, X.K.; Zheng, J.P.; Zhu, M.H. Fretting Wear Behavior of Acrylonitrile-butadiene Rubber (nbr) for Mechanical Seal Applications. Tribol. Int. 2016, 93, 419–428. [Google Scholar]
- Varney, P.; Green, I. Impact Phenomena in a Noncontacting Mechanical Face Seal. J. Tribol. 2017, 139, 022201. [Google Scholar]
- Lebeck, A.O. Principles and Design of Mechanical Face Seals; Wiley: Hoboken, NJ, USA, 1991. [Google Scholar]
- Lebeck, A.O. Mechanical Loading—A Primary Source of Waviness in Mechanical Face Seals. ASLE Trans. 1977, 20, 195–208. [Google Scholar]
- Lebeck, A.O. A Test Apparatus for Measuring the Effects of Waviness in Mechanical Face Seals. ASLE Trans. 1981, 24, 371–378. [Google Scholar]
- Lebeck, A.O. Hydrodynamic Lubrication in Wavy Contacting Face Seals—A Two Dimensional Model. J. Tribol. 1981, 103, 578. [Google Scholar]
- Etsion, I. The Effect of Combined Coning and Waviness on the Separating Force in Mechanical Face Seals. J. Mech. Eng. Sci. 2006, 22, 5964. [Google Scholar]
- Liu, Y.; Liu, W.; Li, Y.; Liu, X.; Wang, Y. Mechanism of a Wavy-tilt-dam Mechanical Seal under Different Working Conditions. Tribol. Int. 2015, 90, 43–54. [Google Scholar]
- Lebeck, A.O.; Young, L.A. Wavy-tilt-dam Seal Ring and Apparatus for Shaping Seal Rings. U.S. Patent No. 4,887,395, 1989. [Google Scholar]
- Salant, R.F.; Payne, J.W.; Johnson, W.R.; Boles, G. Simulation of a Hydraulically Controllable Reactor Coolant Pump Seal. Tribol. Int. 2018, 122, 163–168. [Google Scholar]
- Gustafsson, T.; Hakula, H.; Leinonen, M. Stochastic Galerkin Approximation of the Reynolds Equation with Irregular Film Thickness. Comput. Math. Appl. 2017, 74, 1590–1606. [Google Scholar]
- Chandramoorthy, N.; Hadjiconstantinou, N. A Reynolds Lubrication Equation for Dense Fluids Valid Beyond Navier-Stokes. In Proceedings of the 69th Annual Meeting of the APS Division of Fluid Dynamics, Portland, Oregon, 20–22 November 2016. [Google Scholar]
- Liu, W.; Liu, Y.; Huang, W.F.; Suo, S.F.; Wang, Y.M. Effect of Disturbances on the Dynamic Performance of a Wavy-tilt-dam Mechanical Seal. Tribol. Int. 2013, 64, 63–68. [Google Scholar]
- Liu, W.; Liu, Y.; Wang, Y.; Peng, X. Parametric Study on a Wavy-tilt-dam Mechanical Face Seal in Reactor Coolant Pumps. Tribol. Trans. 2011, 54, 878–886. [Google Scholar]
- Liu, W.; Liu, Y.; Zhai, J.; Huang, W.; Wang, Y. Three-dimensional Flow–heat Coupling Model of a Wavy-tilt-dam Mechanical Seal. Tribol. Trans. 2013, 56, 1146–1155. [Google Scholar]
- Djamaï, A.; Brunetière, N.; Tournerie, B. Numerical Modeling of Thermohydrodynamic Mechanical Face Seals. Tribol. Trans. 2010, 53, 414–425. [Google Scholar]
- Brunetière, N.L.; Tournerie, B.; Jean Frêne, J. Tehd lubrication of Mechanical Face Seals in Stable Tracking Mode: Part 2—Parametric Study. J. Tribol. 2003, 125, 617–627. [Google Scholar]
- Li, Z.D.; Hao, M.; Yang, W.; Han, J.; Ren, B. Effects of Waviness and Taper on Cavitation Characteristics of Liquid Lubricated Mechanical Seals. CIESC J. 2016, 67, 2005–2014. [Google Scholar]
- Huo, F.W. Ultra-precision Grinding of the Complex Surfaces of Hydrodynamic Seal Rings Used in Reactor Coolant Pumps. J. Mech. Eng. 2012, 48, 184. [Google Scholar]
- Huo, F.W. Ultra-precision Grinding of the Wavy-tilt-dam Seal Rings Used in Reactor Coolant Pumps. J. Mech. Eng. 2013, 49, 154. [Google Scholar]
- Feng, G.; Guo, D.M.; Huo, F.W.; Jin, Z.J.; Kang, R.K. Implementation Strategies for High Accuracy Grinding of Hydrodynamic Seal Ring with Wavy Face for Reactor Coolant Pumps. Sci. China Technol. Sci. 2013, 56, 2403–2412. [Google Scholar]
- Han, C. Study on Process of Wolfram Carbide Sealing Ring with Waviness Surface by Accurate Grinding; National University of Defense Technology: Changsha, China, 2011. [Google Scholar]
- Wang, X.X. Mechanism Analysis and Experimental Study on Combined Coning and Waviness Mechanical Face Seal for Nuclear Reactor Coolant Pump; Tsinghua University: Beijing, China, 2011. [Google Scholar]
- Feng, X.D.; Ma, Y.; Song, K.L.; Tan, H.P.; Li, M.Q.; Lyu, Y.G. Engineering Development and Application of Hydrodynamic Mechanical Seal of Reactor Coolant Pump. Nucl. Power Eng. 2019, 40, 142–145. [Google Scholar]
- Meng, X.K.; Bai, S.X.; Peng, X.D. An Efficient Adaptive Finite Element Method Algorithm with Mass Conservation for Analysis of Liquid Face Seals. J. Zhejiang Univ. Sci. A 2014, 15, 172–184. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value |
|---|---|
| Outer radius Ro (mm) | 152 |
| Inner radius Ri (mm) | 138.55 |
| Dam radius Rd (mm) | 141.5 |
| Numbers of waviness z | 9 |
| Waviness amplitude ha (μm) | 5.0; 6.3; 6.9 |
| Balance ratio | 0.745 |
| Outer pressure po (MPa) | 2.0; 5.3; 10.6; 15.9 |
| Inner pressure pi (MPa) | 0 |
| Pressure difference Δp = po − pi (MPa) | 2.0; 5.3; 10.6; 15.9 |
| Rotor speed n (rpm) | 1485 |
| Medium | Water |
| Density ρ (kg/m3) | 998.2 |
| Viscosity μ (kg/(m·s)) | 1.003 × 10−3 (20 °C) |
| Measurement | Identification | Output Signal | Accuracy | Range |
|---|---|---|---|---|
| Medium pressure | P_BW | 4–20 mA | ±1% | 0–25 MPa |
| Low-pressure leakage rate | Q_LPL | 4–20 mA | ±0.5% | 0–100 L/h |
| Medium temperature | T_BW | 4–20 mA | Grade B | 0–100 °C |
| Rotating speed | S_MM | 4–20 mA | 0.01% | 0–2000 rpm |
| ha/μm | Pressure/MPa | Test Value/L·h−1 | Calculated Value/L·h−1 |
|---|---|---|---|
| 5.0 | 5.3 | 10.65 | 5.02 |
| 10.6 | 16.44 | 15.76 | |
| 15.9 | 22.08 | 25.55 | |
| 6.3 | 5.3 | 8.22 | 12.52 |
| 10.6 | 14.91 | 31.52 | |
| 15.9 | 23.02 | 51.11 | |
| 6.9 | 5.3 | 8.04 | 16.31 |
| 10.6 | 12.85 | 41.40 | |
| 15.9 | 23.02 | 51.11 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Feng, X.; Su, W.; Ma, Y.; Wang, L.; Tan, H. Numerical and Experimental Study on Waviness Mechanical Seal of Reactor Coolant Pump. Processes 2020, 8, 1611. https://doi.org/10.3390/pr8121611
Feng X, Su W, Ma Y, Wang L, Tan H. Numerical and Experimental Study on Waviness Mechanical Seal of Reactor Coolant Pump. Processes. 2020; 8(12):1611. https://doi.org/10.3390/pr8121611
Chicago/Turabian StyleFeng, Xiaodong, Wentao Su, Yu Ma, Lei Wang, and Heping Tan. 2020. "Numerical and Experimental Study on Waviness Mechanical Seal of Reactor Coolant Pump" Processes 8, no. 12: 1611. https://doi.org/10.3390/pr8121611
APA StyleFeng, X., Su, W., Ma, Y., Wang, L., & Tan, H. (2020). Numerical and Experimental Study on Waviness Mechanical Seal of Reactor Coolant Pump. Processes, 8(12), 1611. https://doi.org/10.3390/pr8121611