

Research on a Non-Contact Multi-Electrode Voltage Sensor and Signal Processing Algorithm

Abstract
:1. Introduction
2. Design of the Voltage Sensor
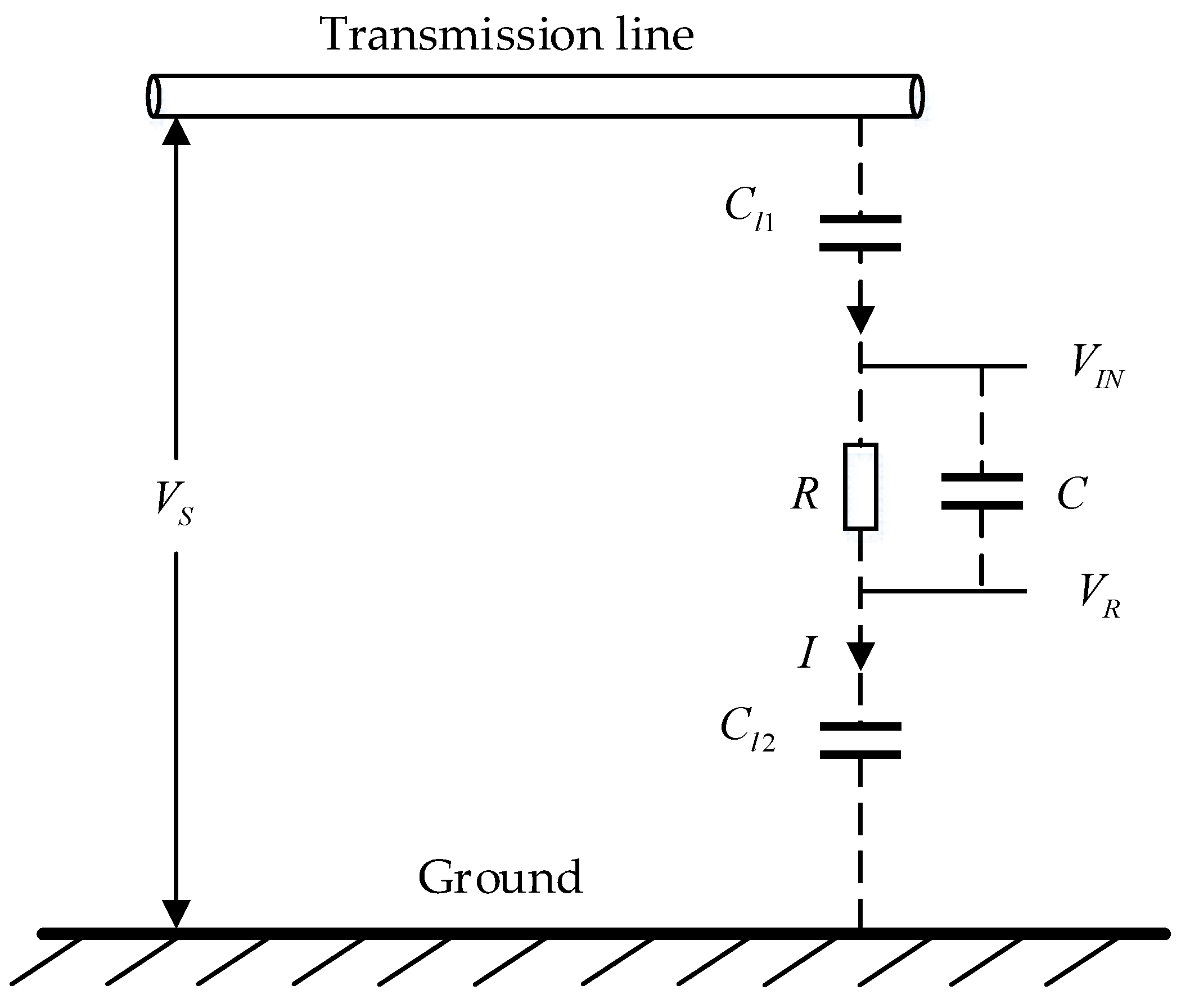
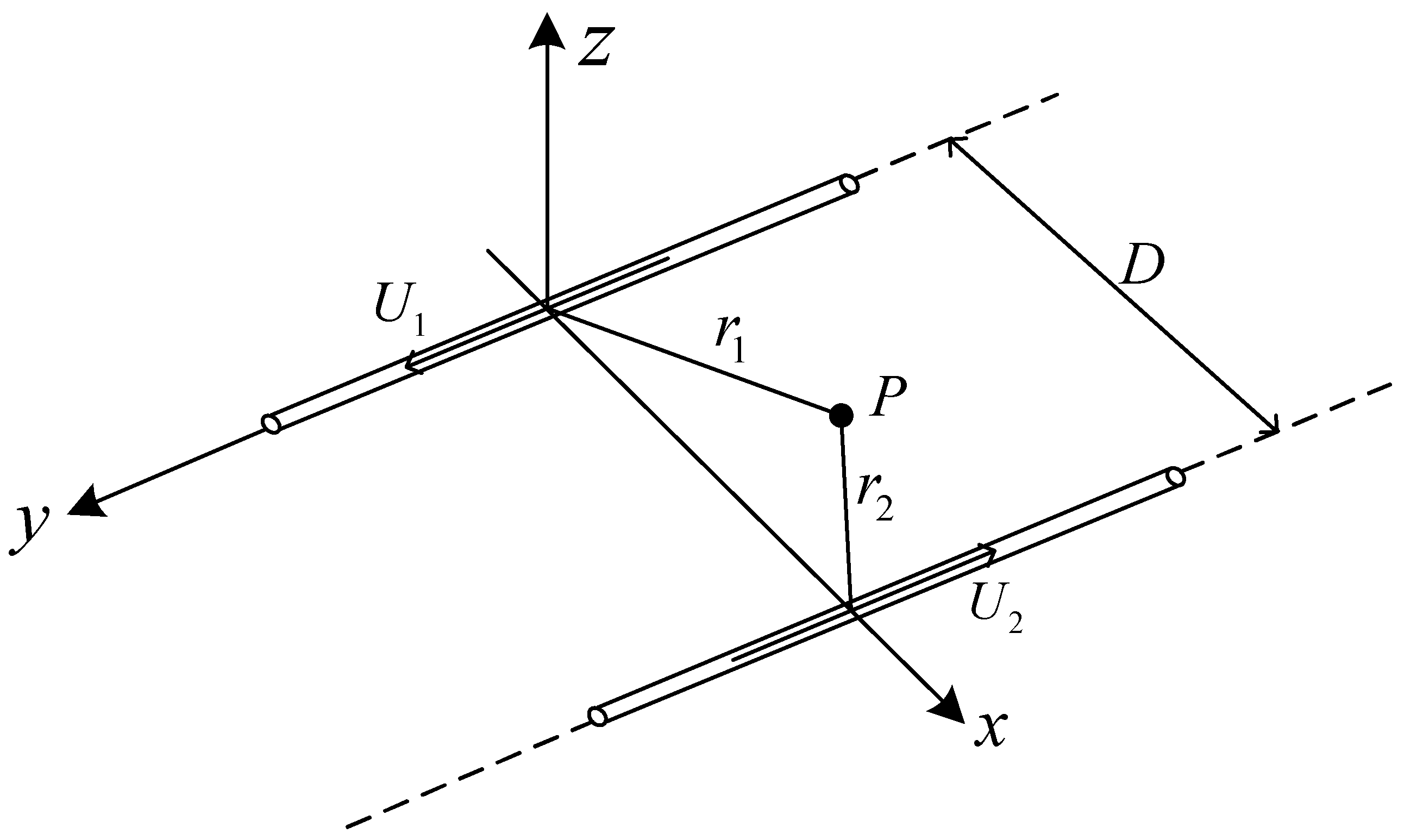
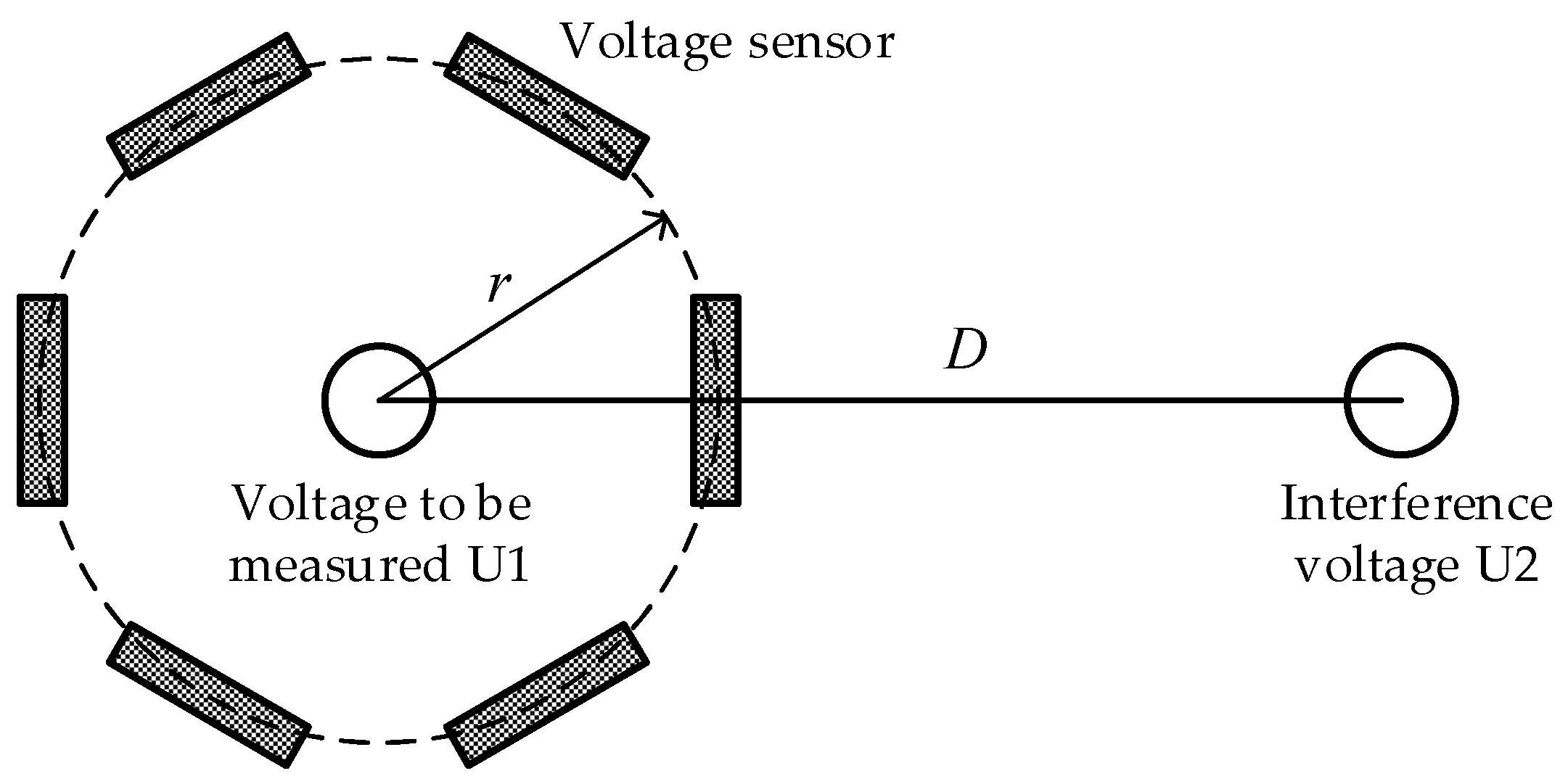
2.1. Principle of the Voltage Sensor
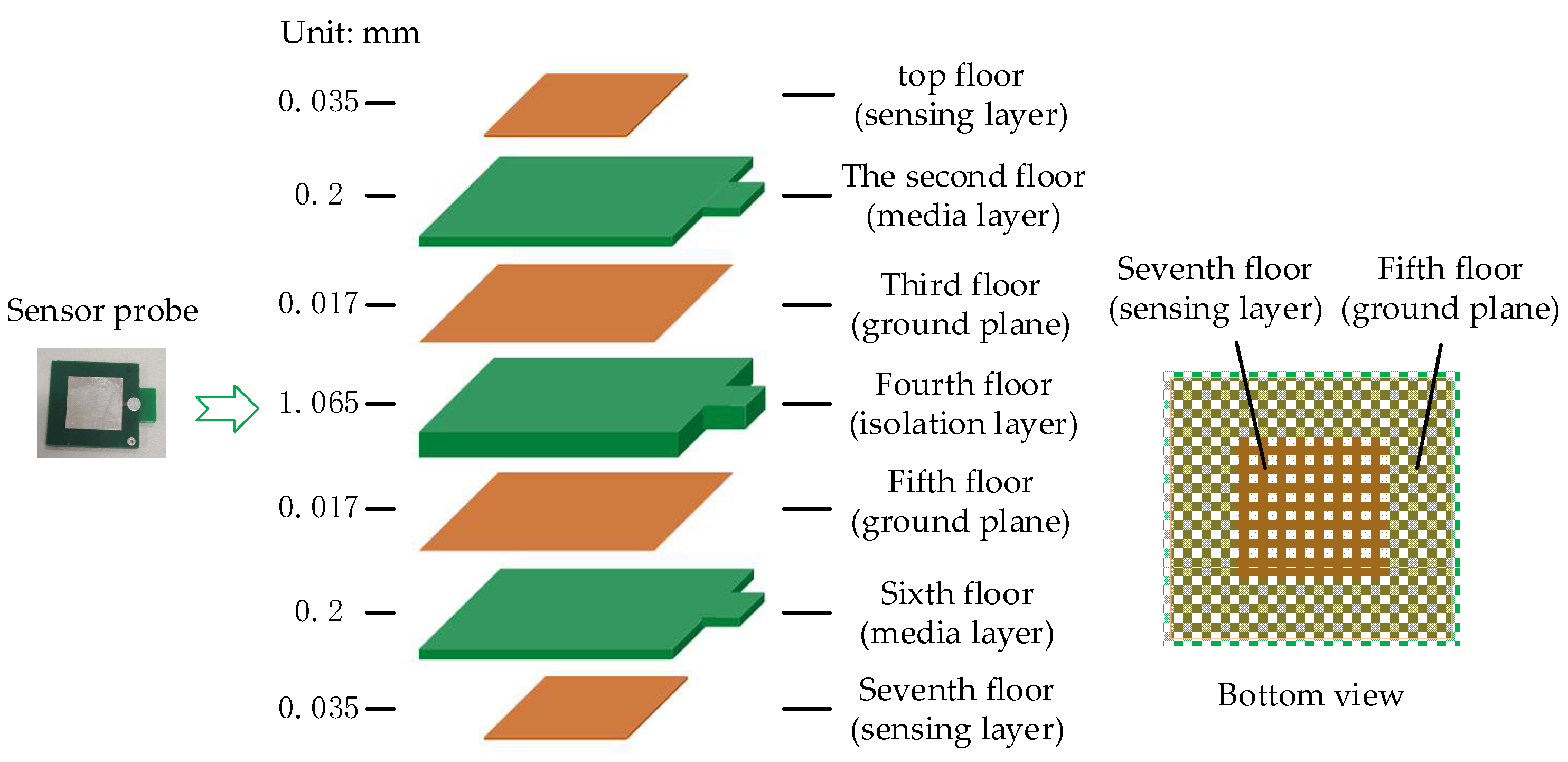
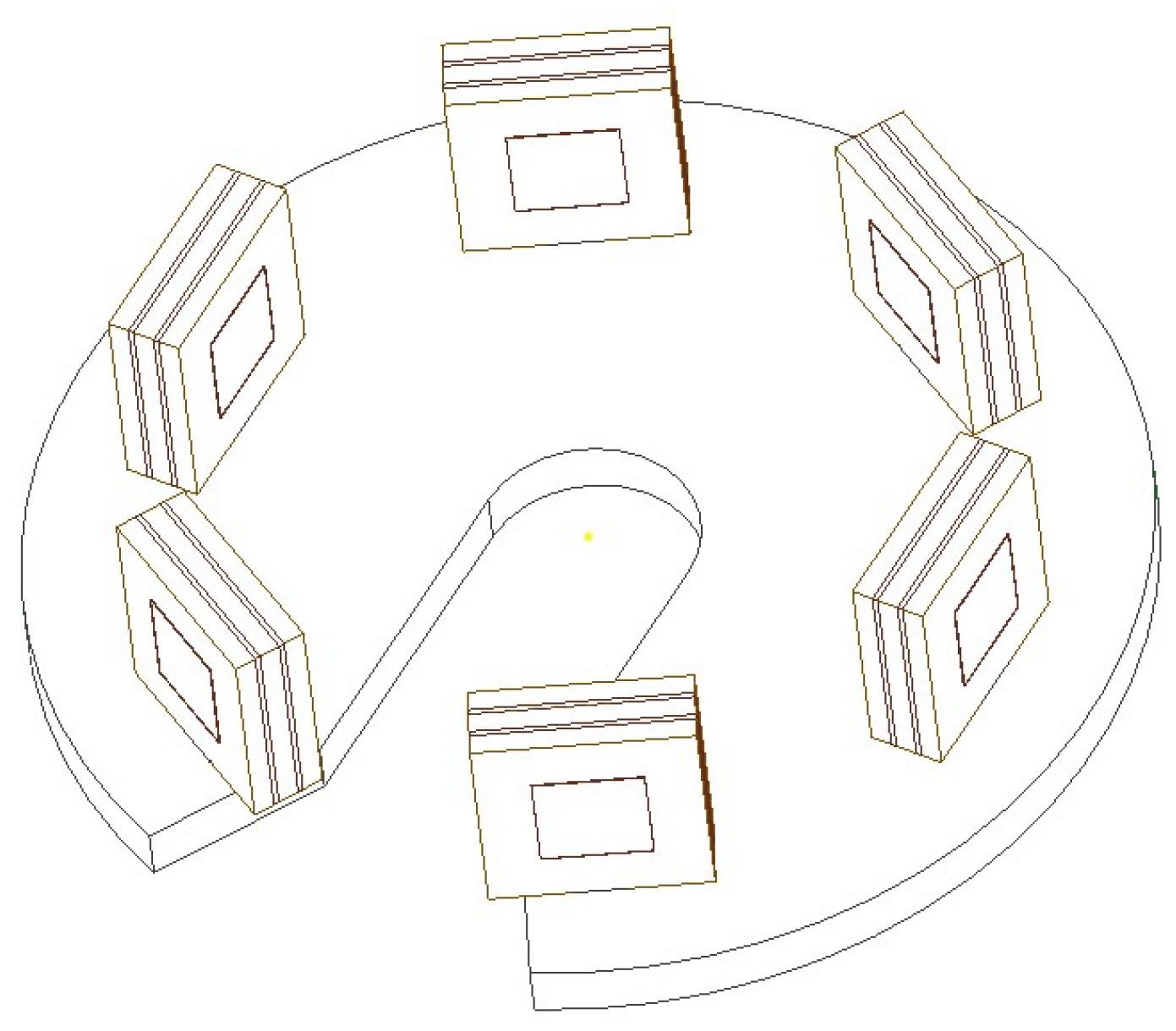
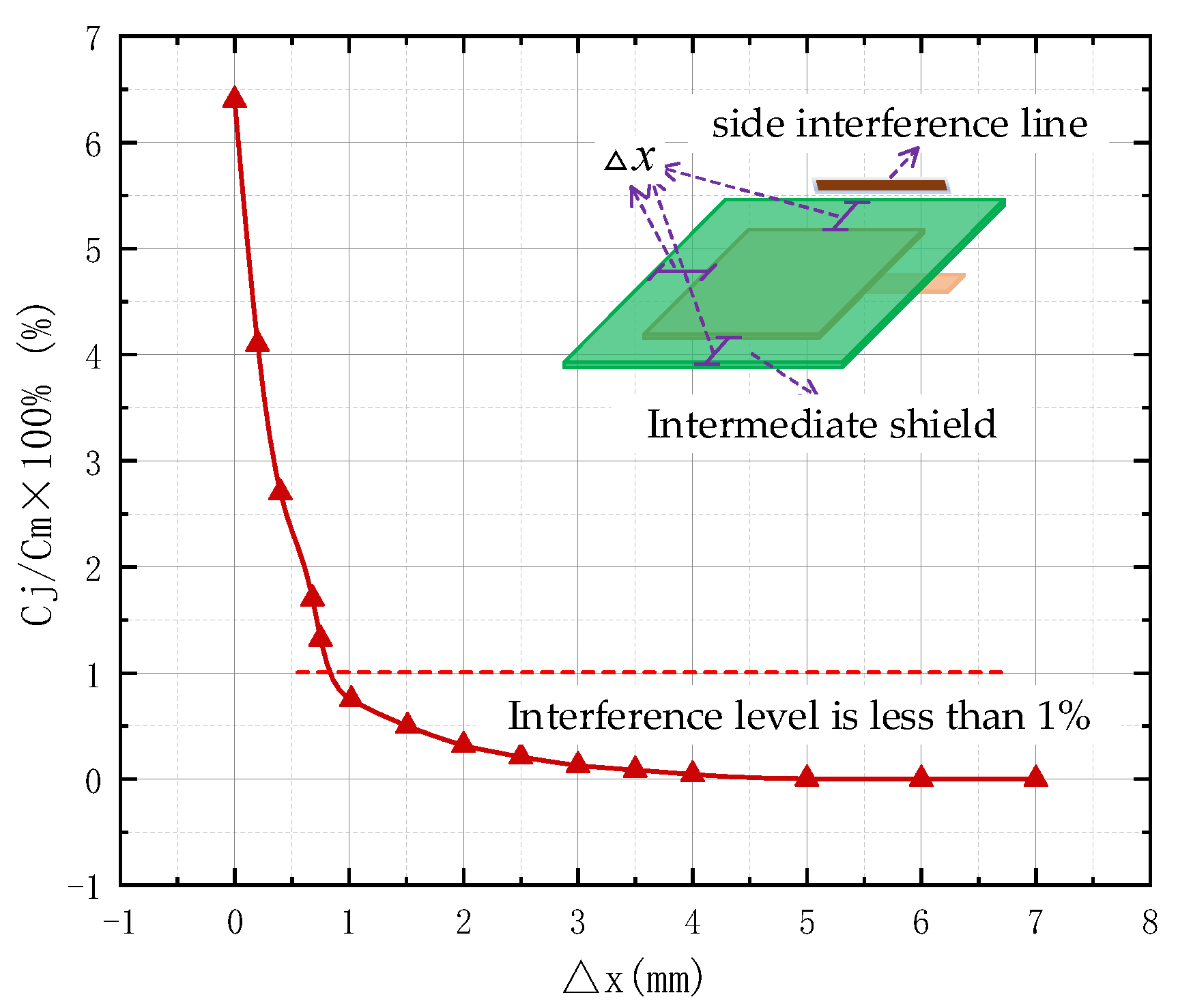
2.2. Sensor Parameter Design
3. Research on Experiment and Data Processing Algorithm
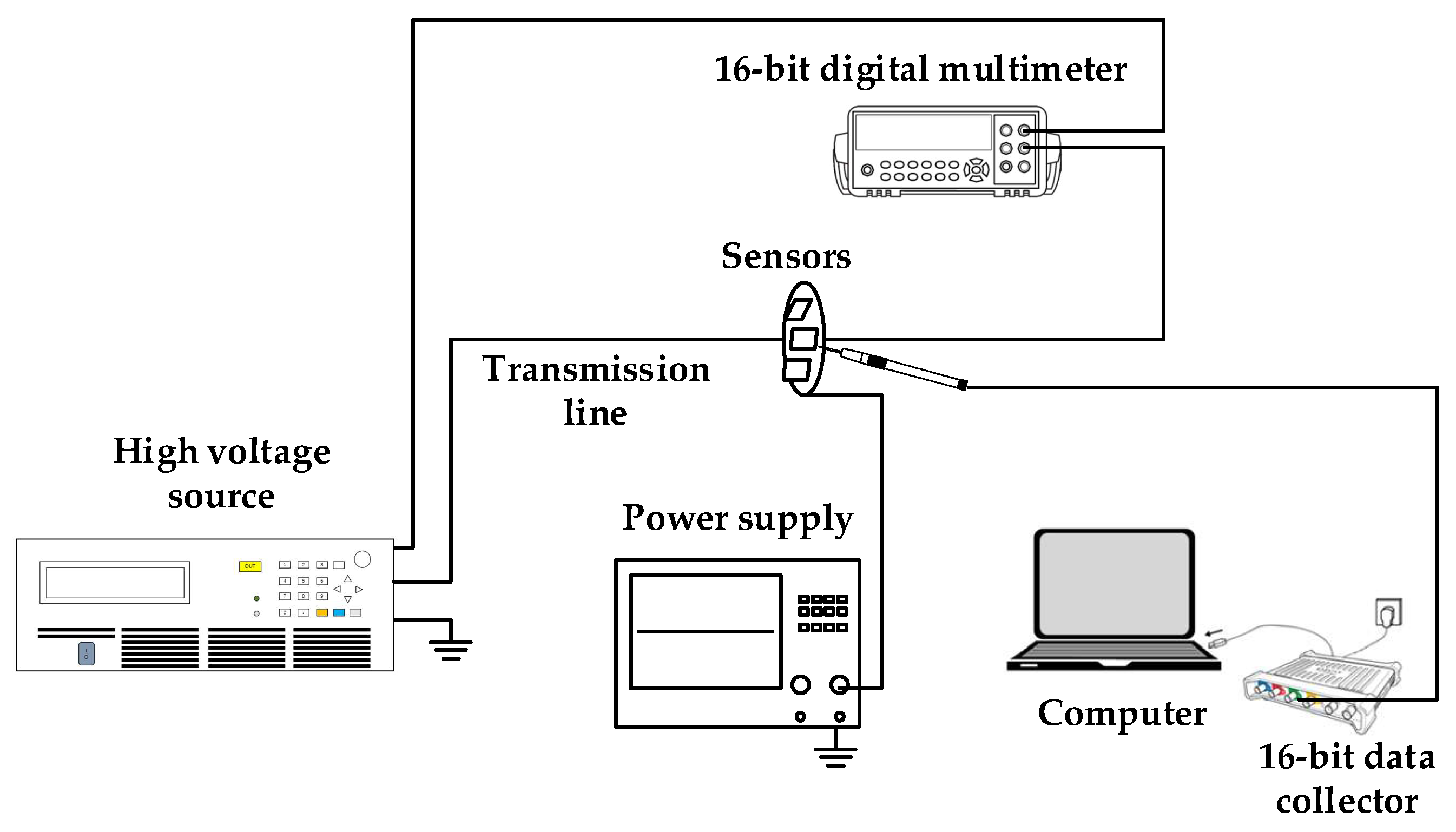
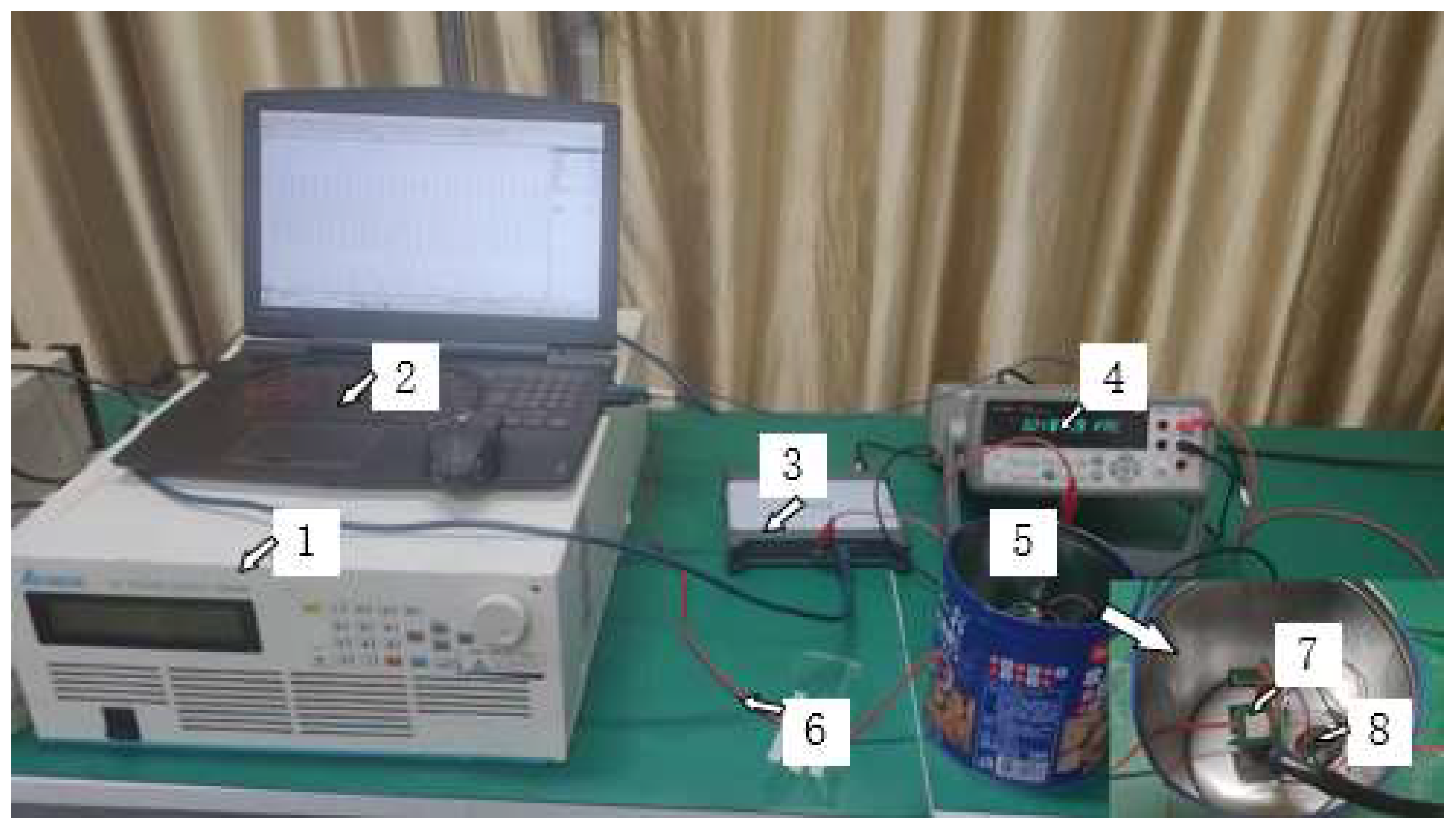
3.1. Experimental Platform Construction and Data Collection
3.2. Signal Processing Algorithms
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yang, P.; Wen, X.; Lv, Y.; Chu, Z.; Peng, C. A non-intrusive voltage measurement scheme based on MEMS electric field sensors: Theoretical analysis and experimental verification of AC power lines. Rev. Sci. Instrum. 2021, 92, 065002. [Google Scholar] [CrossRef] [PubMed]
- Reza, M.; Rahman, H.A. Non-Invasive Voltage Measurement Technique for Low Voltage AC Lines. In Proceedings of the 2021 IEEE 4th International Conference on Electronics Technology (ICET), Chengdu, China, 7–10 May 2021; pp. 143–148. [Google Scholar]
- Zhang, Y.; Zhang, C.; Li, H.; Chen, Q. An online detection method for capacitor voltage transformer with excessive measurement error based on multi-source heterogeneous data fusion. Measurement 2021, 187, 110262. [Google Scholar] [CrossRef]
- Femine, A.D.; Gallo, D.; Landi, C.; Schiavo, A.L.; Luiso, M. Low Power Contactless Voltage Sensor for Low Voltage Power Systems. Sensors 2019, 19, 3513. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Guo, Z.; Shi, W.; Lei, T.; He, Z.; Kang, P. Transient voltage measurement for UHV AC substation using non-contact electro-optic field sensor. In Proceedings of the 18th International Conference on AC and DC Power Transmission (ACDC 2022), online, 2–3 July 2022; pp. 695–699. [Google Scholar] [CrossRef]
- Fuqing, Y.; Lu, J. Non-contact sensing and modelling on the voltage and electric field for powered transmission line. J. Phys. Conf. Ser. 2020, 1453, 012115. [Google Scholar] [CrossRef]
- Wang, J.; Gao, L. Research on the Algorithm and Test of Transmission Line Voltage Measurement Based on Electric Field Integral Method. IEEE Access 2018, 6, 72766–72773. [Google Scholar] [CrossRef]
- Xu, Q.; Dong, C.; Huang, Y. An Electronic Voltage Transducer Based on Electrostatic Charge Escape. IEEE Trans. Instrum. Meas. 2022, 71, 6006808. [Google Scholar] [CrossRef]
- Wetula, A.; Bień, A.; Parekh, M. New Sensor for Medium- and High-Voltage Measurement. Energies 2021, 14, 4654. [Google Scholar] [CrossRef]
- Fan, J.; Ai, C.; Guo, A.; Yan, X.; Wang, J. Evaluation of Electric Field Integral Voltage Measurement Method of Transmission Line Based on Error Transmission and Uncertainty Analysis. Sensors 2021, 21, 4340. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.; Zhao, Y.; Li, W.; Zeng, X.; Tang, J.; Wang, Y.; Deng, X. Research on Transmission Line Voltage Measurement Method of D-Dot Sensor Based on Gaussian Integral. Sensors 2018, 18, 2455. [Google Scholar] [CrossRef]
- Li, J.; Liu, J.; Peng, C.; Liu, X.; Wu, Z.; Zheng, F. Design and Testing of a Non-Contact MEMS Voltage Sensor Based on Single-Crystal Silicon Piezore-sistive Effect. Micromachines 2022, 13, 619. [Google Scholar] [CrossRef]
- Leng, Y.; Shu, L.; Qian, Q.; Chen, C.; Lin, Y. Contactless Voltage Measurement Considering Spatially Dependent Voltage Compensation. Sens. Mater. 2022, 34, 1057. [Google Scholar] [CrossRef]
- Peng, J.; Bian, J.; Jia, S.; Kang, X.; Yu, H.; Yang, Y. Design of an electro-optical sensor with high sensitivity for AC electric field measurement. Sens. Rev. 2022, 42, 187–194. [Google Scholar] [CrossRef]
- Liu, S.; Chen, Y.; Jiang, J.; Wu, Y.; Guo, J.; Chen, L. Quantum enhanced electro-optic sensor for E-field measurement. Opt. Express 2021, 29, 32865–32874. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Lin, Y.; Xie, N. Design of optical voltage sensor based on electric field regulation and rotating isomerism electrode. arXiv 2022, arXiv:2206.06822. [Google Scholar]
- Edmunds, J.L.; Sonmezoglu, S.; Martens, J.; Von Meier, A.; Maharbiz, M.M. Optical voltage sensor based on a piezoelectric thin film for grid applications. Opt. Express 2021, 29, 33716. [Google Scholar] [CrossRef]
- Yang, P.; Wen, X.; Chu, Z.; Ni, X.; Peng, C. Non-intrusive DC voltage measurement based on resonant electric field microsensors. J. Micromech. Microeng. 2021, 31, 064001. [Google Scholar] [CrossRef]
- Shenil, P.; George, B. An auto-balancing scheme for non-contact ac voltage measurement. In Proceedings of the 2018 IEEE 9th International Workshop on Applied Measurements for Power Systems (AMPS), Bologna, Italy, 26–28 September 2018; pp. 1–5. [Google Scholar]
- Gorla, D.P.M.; Janus, P.; Edin, H. Non-contact Voltage Measurement Technique for On-Line Monitoring of Transient Overvolt-ages. In Proceedings of the Nordic Insulation Symposium, Trondheim, Norway, 13–15 June 2022; Volume 27. [Google Scholar]
- Yan, X.; Wang, L.; Zhou, Y. Design of Reciprocal Optical Path for Voltage Measurement Based on Pockels Effect. In Proceedings of the 2021 International Conference on Digital Society and Intelligent Systems (DSInS), Chengdu, China, 19–21 November 2021; pp. 271–274. [Google Scholar]
- Jiang, S.; Jia, R.; Tao, K.; Wu, Y.; Liu, S. High-resistance voltage dividers fabricated by thin polysilicon films in silicon drift detectors. J. Mater. Sci. Mater. Electron. 2019, 30, 6617–6627. [Google Scholar] [CrossRef]
- Martins, A.V.; Bacurau, R.M.; dos Santos, A.D.; Ferreira, E.C. Nonintrusive energy meter for nontechnical losses identification. IEEE Trans. Instrum. Meas. 2019, 69, 1140–1147. [Google Scholar] [CrossRef]
- Hrbac, R.; Kolar, V.; Bartlomiejczyk, M.; Mlcak, T.; Orsag, P.; Vanc, J. A Development of a Capacitive Voltage Divider for High Voltage Measurement as Part of a Combined Current and Voltage Sensor. Elektron. Elektrotech. 2020, 26, 25–31. [Google Scholar] [CrossRef]
- Haberman, M.A.; Spinelli, E.M. A noncontact voltage measurement system for power-line voltage waveforms. IEEE Trans. Instrum. Meas. 2019, 69, 2790–2797. [Google Scholar] [CrossRef]
- Haberman, M.A.; Spinelli, E.M. Noncontact ac voltage measurements: Error and noise analysis. IEEE Trans. Instrum. Meas. 2018, 67, 1946–1953. [Google Scholar] [CrossRef]
- Thomas, A.J.; Iyyappan, C.; Reddy, C.C. On the measurement of surface voltage of insulators and bushings. IEEE Trans. Power Deliv. 2021, 37, 464–471. [Google Scholar] [CrossRef]
- Zhou, Z.; Shu, G.; Li, D. Research on non-contact household voltage measuring device based on capacitive coupling principle. Electr. Autom. 2020, 42, 98–100. [Google Scholar]
- Shenil, P.; George, B. Development of a nonintrusive true-rms ac voltage measurement probe. IEEE Trans. Instrum. Meas. 2019, 68, 3899–3906. [Google Scholar] [CrossRef]
- Kong, H.; Shan, M.; Sukkarieh, S.; Chen, T.; Zheng, W.X. Kalman filtering under unknown inputs and norm constraints. Automatica 2021, 133, 109871. [Google Scholar] [CrossRef]
- Kozlov, V.K.; Ivanov, D.A.; Kirzhatskikh, E.R. Voltage Measuring Sensor Based on Capacitive Voltage Divider. In Proceedings of the 2022 International Ural Conference on Electrical Power Engineering (UralCon), Magnitogorsk, Russia, 23–25 September 2022; pp. 250–254. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
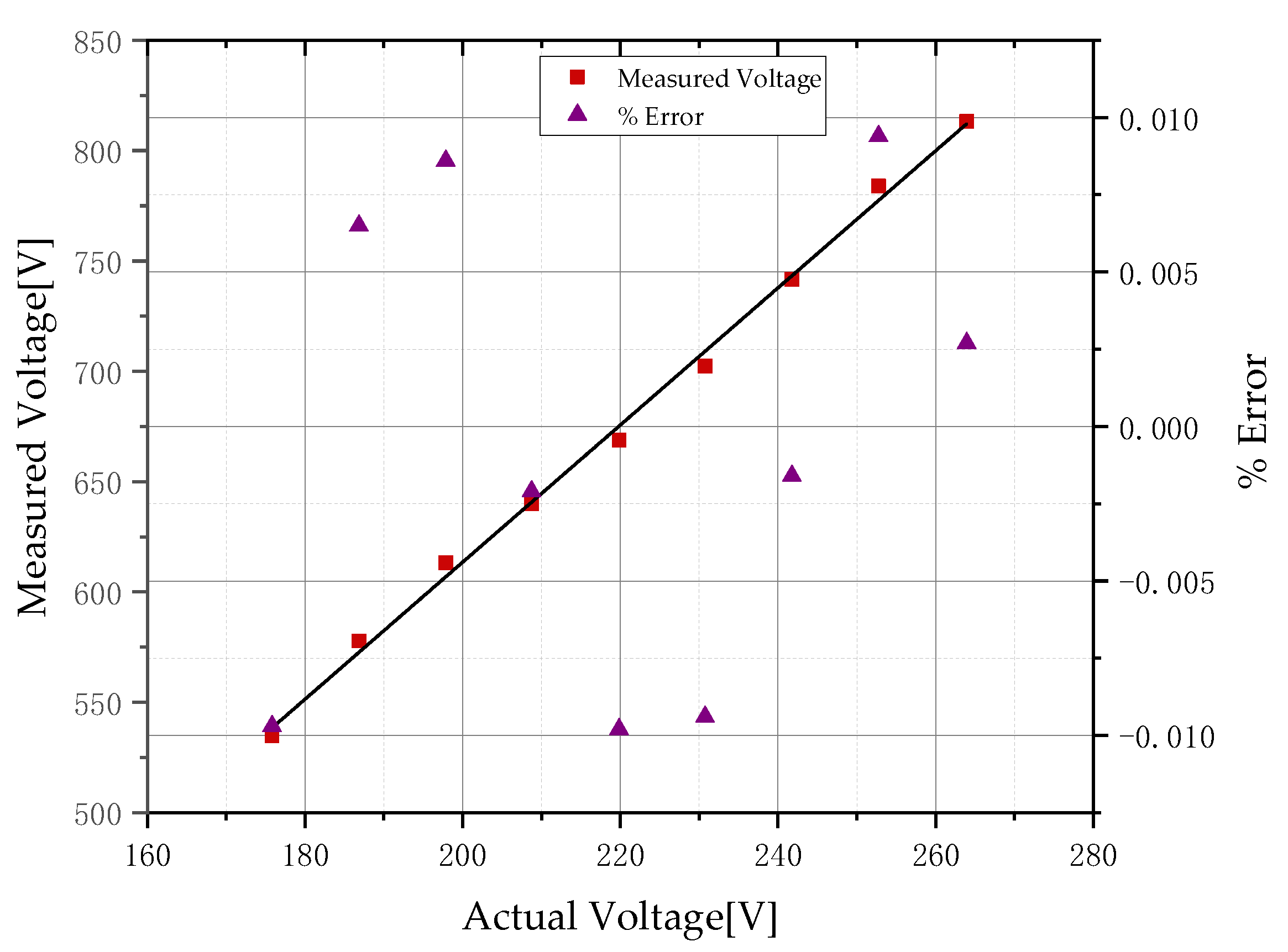
| Measuring Point | /% | |||
|---|---|---|---|---|
| 80% | 175.82 | 535 | −0.97% | 3.12 |
| 85% | 186.85 | 578 | 0.65% | 2.79 |
| 90% | 197.87 | 613 | 0.86% | 3.41 |
| 95% | 208.76 | 640 | −0.21% | 3.16 |
| 100% | 219.84 | 669 | −0.98% | 2.84 |
| 105% | 230.76 | 702 | −0.94% | 2.61 |
| 110% | 241.78 | 742 | −0.16% | 2.53 |
| 115% | 252.77 | 782 | −0.94% | 3.18 |
| 120% | 263.95 | 813 | 0.27% | 3.12 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Yang, Y.; Zhao, J.; Huang, R.; Cheng, K.; He, M. Research on a Non-Contact Multi-Electrode Voltage Sensor and Signal Processing Algorithm. Sensors 2022, 22, 8573. https://doi.org/10.3390/s22218573
Zhang W, Yang Y, Zhao J, Huang R, Cheng K, He M. Research on a Non-Contact Multi-Electrode Voltage Sensor and Signal Processing Algorithm. Sensors. 2022; 22(21):8573. https://doi.org/10.3390/s22218573
Chicago/Turabian StyleZhang, Wenbin, Yonglong Yang, Jingjing Zhao, Rujin Huang, Kang Cheng, and Mingxing He. 2022. "Research on a Non-Contact Multi-Electrode Voltage Sensor and Signal Processing Algorithm" Sensors 22, no. 21: 8573. https://doi.org/10.3390/s22218573
APA StyleZhang, W., Yang, Y., Zhao, J., Huang, R., Cheng, K., & He, M. (2022). Research on a Non-Contact Multi-Electrode Voltage Sensor and Signal Processing Algorithm. Sensors, 22(21), 8573. https://doi.org/10.3390/s22218573