
Non-Linear Response of Cable-Mass-Spring System in High-Rise Buildings under Stochastic Seismic Excitation


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
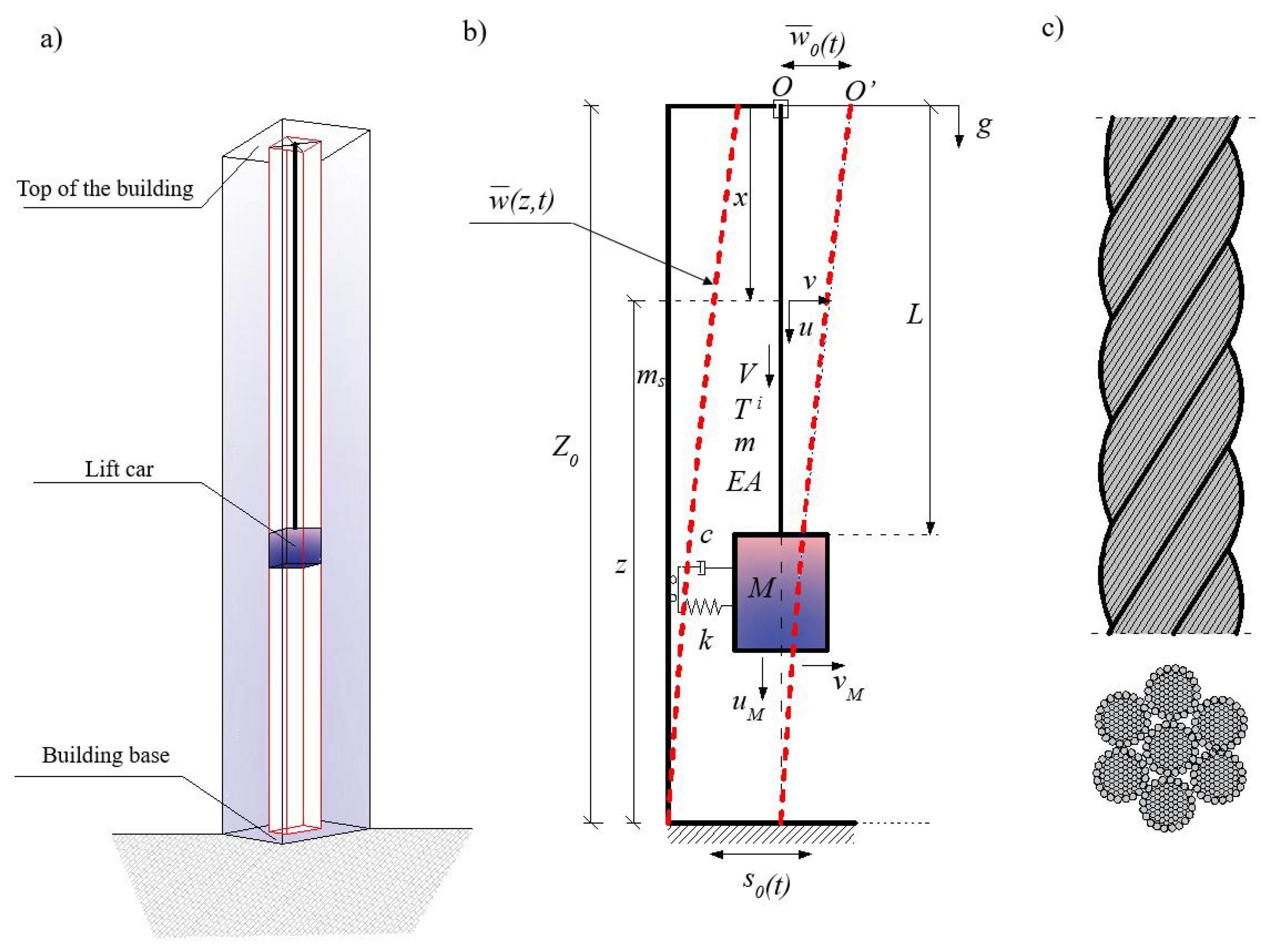
2.1. Schematic Cable-Mass-Spring Model
2.2. Non-Linear System
2.3. Base Excitation and the Nonlinear Response of the Cable-Mass-Spring System
2.4. Stochastic Modelling of the Ground Motion Due to an Earthquake
2.5. Equivalent Linearization Technique Implementation
3. Numerical Results and Discussion
3.1. Main Assumption for Numerical Calculation
3.2. Nonlinear Results under Harmonic Excitation via Equivalent Linearization Technique
3.3. Verification Using Monte Carlo Simulation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hu, R.P.; Xu, Y.L. SHM-Based Seismic Performance Assessment of High-Rise Buildings under Long-Period Ground Motion. J. Struct. Eng. 2019, 145, 04019038. [Google Scholar] [CrossRef]
- Zhou, Y.; Xing, L.; Zhou, G. Spectrum Analysis-Based Model for the Optimal Outrigger Location of High-Rise Buildings. J. Earthq. Eng. 2021, 25, 2406–2431. [Google Scholar] [CrossRef]
- Strakosch, G.R. The Vertical Transportation Handbook; John Wiley: New York, NY, USA, 1998. [Google Scholar]
- Kaczmarczyk, S.; Iwankiewicz, R.; Terumichi, Y. The dynamic behavior of nonstationary elevator compensating rope system under harmonic and stochastic excitation. J. Phys. Conf. Ser. 2009, 181, 12–47. [Google Scholar] [CrossRef] [Green Version]
- Suarez, L.E.; Singh, M.P. Review of Earthquake Performance, Seismic Codes, and Dynamic Analysis of Elevators. Earthq. Spectra 2000, 16, 853–878. [Google Scholar] [CrossRef]
- Singh, M.P. Seismic protection of counterweight—Rail in elevators in buildings. Earthq. Eng. Struct. Dyn. 2006, 35, 385–394. [Google Scholar]
- Segal, F.; Rutenberg, A.; Levy, R. Earthquake Response of Structure-Elevator System. J. Struct. Eng. 1996, 122, 607–616. [Google Scholar] [CrossRef]
- Hu, R.P.; Xu, Y.L.; Zhao, X. Long-period ground motion simulation and its impact on seismic response of high-rise buildings. J. Earthq. Eng. 2017, 22, 1285–1315. [Google Scholar] [CrossRef]
- Kaczmarczyk, S. The modeling and prediction of dynamic responses of slender continua deployed in tall structures under long-period seismic excitations. J. Phys. Conf. Ser. 2018, 1048, 012005. [Google Scholar] [CrossRef] [Green Version]
- Kaczmarczyk, S. The prediction and control of dynamic interactions between tall buildings and high-rise vertical transportation systems subject to seismic excitations. In Proceedings of the 25th International Congress on Sound and Vibration (ICSV 25), Hiroshima, Japan, 8–12 July 2018. [Google Scholar]
- Terumichi, Y.; Ohtsuka, M.; Yoshizawa, M.; Fukawa, Y.; Tsujioka, Y. Nonstationary vibrations of a string with time-varying length and a mass-spring system attached at the lower end. Nonlinear Dyn. 1997, 12, 39–55. [Google Scholar] [CrossRef]
- Bremaud, P. Markov Chains, Gibbs Fields, Monte Carlo Simulation and Queues; Springer: New York, NY, USA, 1999. [Google Scholar]
- Spanos, P.D.; Zeldin, B.A. Monte Carlo treatment of random fields: A broad perspective. Appl. Mech. Rev. 1998, 51, 219–237. [Google Scholar] [CrossRef]
- Hurtado, J.; Barbat, H. Monte Carlo techniques in computational stochastic mechanics. Archiv. Comput. Methods Eng. 1998, 5, 3–30. [Google Scholar] [CrossRef]
- Spanos, P.D. Stochastic linearization in Structural Dynamics. Appl. Mech. Rev. 1981, 34, 1–8. [Google Scholar]
- Weber, H.; Kaczmarczyk, S.; Iwankiewicz, R. Non-linear dynamic response of a cable system with a tuned mass damper to stochastic base excitation via equivalent linearization technique. Meccanica 2020, 55, 2413–2422. [Google Scholar] [CrossRef]
- Caughey, T.H. Equivalent linearization techniques. J. Acoust. Soc. Am. 1963, 35, 1706–1711. [Google Scholar] [CrossRef]
- Roberts, J.B. Response of non-linear mechanical systems to random excitations: Part II Equivalent linearization and other methods. Shock Vib. Dig. 1981, 13, 15–29. [Google Scholar] [CrossRef]
- Roberts, J.B.; Spanos, P.D. Random Vibration and Statistical Linearization; John Wiley and Sons: New York, NY, USA, 1990. [Google Scholar]
- Socha, L. Linearization Methods for Stochastic Dynamic Systems; Lecture Notes in Physics 730; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Proppe, C.; Pradlwarter, H.J.; Schuëller, G.I. Equivalent linearization and Monte Carlo simulation in stochastic dynamics. Probabilistic Eng. Mech. 2003, 18, 1–15. [Google Scholar] [CrossRef]
- Iwankiewicz, R.; Nielsen, S.R.K. Dynamic response of hysteretic systems to Poisson-distributed pulse trains. Probabilistic Eng. Mech. 1992, 7, 135–148. [Google Scholar] [CrossRef]
- Fragkoulis, V.C.; Kougioumtzoglou, I.A.; Pantelous, A.A. Statistical linearization of nonlinear structural systems with singular matrices. J. Eng. Mech. 2016, 142, 04016063. [Google Scholar] [CrossRef] [Green Version]
- Giacu, G.F.; Caragolia, L.; Barbiellini, B. Higher-order moments of eigenvalue and eigenvector distributions for the nonlinear stochastic dynamics of cable networks. Procedia Eng. 2017, 199, 637–642. [Google Scholar] [CrossRef]
- Younespour, A.; Cheng, S.; Ghaffarzadeh, H. An equivalent linearization method for nonlinear systems under nonstationary random excitations using orthogonal functions. Struct. Eng. Mech. 2018, 66, 139–149. [Google Scholar]
- Spanos, P.D.; Zhang, Y.F. Formulation of statistical linearization for MDOF systems subject to combined periodic and stochastic excitations. J. Appl. Mech. 2019, 86, 101003. [Google Scholar] [CrossRef]
- Burlon, A.; Kougioumtzoglou, I.A.; Failla, G.; Arena, F. Nonlinear Random Vibrations of Beams with In-Span Supports via Statistical Linearization with Constrained Modes. J. Eng. Mech. 2019, 145, 04019038. [Google Scholar] [CrossRef]
- Su, C.; Xian, J.; Huang, H. An iterative equivalent linearization approach for stochastic sensitivity analysis of hysteretic systems under seismic excitations based on explicit time-domain method. Comput. Struct. 2020, 242, 106396. [Google Scholar] [CrossRef]
- Meyrovitch, L. Dynamics and Control of Structures; John Wiley: New York, NY, USA, 1990. [Google Scholar]
- Nayfeh, A.H.; Pai, P.F. Linear and Nonlinear Structural Mechanics; John Wiley: New York, NY, USA, 2004. [Google Scholar]
- Evan-Iwanowski, R.M. Resonance Oscillations in Mechanical Systems; Elsevier Scientific Publishing Company: Amsterdam, The Netherlands, 1976. [Google Scholar]
- Mitropolskii, Y.A. Problems of the Asymptotic Theory of Nonstationary Vibrations; Israel Program for Scientific Translations Ltd: Jerusalem, Israel, 1965. [Google Scholar]
- Kaczmarczyk, S.; Iwankiewicz, R. Gaussian and non-Gaussian stochastic response of slender continua with time-varying length deployed in tall structures. Int. J. Mech. Sci. 2017, 134, 500–510. [Google Scholar] [CrossRef] [Green Version]
- Atalik, T.S.; Utku, S. Stochastic Linearization of Multi-degree-of-freedom Nonlinear Systems. Earthq. Eng. Struct. Dyn. 1976, 4, 411–420. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Weber, H.; Kaczmarczyk, S.; Iwankiewicz, R. Non-Linear Response of Cable-Mass-Spring System in High-Rise Buildings under Stochastic Seismic Excitation. Materials 2021, 14, 6858. https://doi.org/10.3390/ma14226858
Weber H, Kaczmarczyk S, Iwankiewicz R. Non-Linear Response of Cable-Mass-Spring System in High-Rise Buildings under Stochastic Seismic Excitation. Materials. 2021; 14(22):6858. https://doi.org/10.3390/ma14226858
Chicago/Turabian StyleWeber, Hanna, Stefan Kaczmarczyk, and Radosław Iwankiewicz. 2021. "Non-Linear Response of Cable-Mass-Spring System in High-Rise Buildings under Stochastic Seismic Excitation" Materials 14, no. 22: 6858. https://doi.org/10.3390/ma14226858
APA StyleWeber, H., Kaczmarczyk, S., & Iwankiewicz, R. (2021). Non-Linear Response of Cable-Mass-Spring System in High-Rise Buildings under Stochastic Seismic Excitation. Materials, 14(22), 6858. https://doi.org/10.3390/ma14226858