Body Bias Optimization for Real-Time Systems

Abstract
:1. Introduction
- A mathematical model for calculating energy overhead based on the double exponential equation,
- increasing the accuracy of the energy overhead calculation model, and
- a method for optimizing energy consumption by optimizing the BB voltage and supply voltage by applying NLP.
2. Background
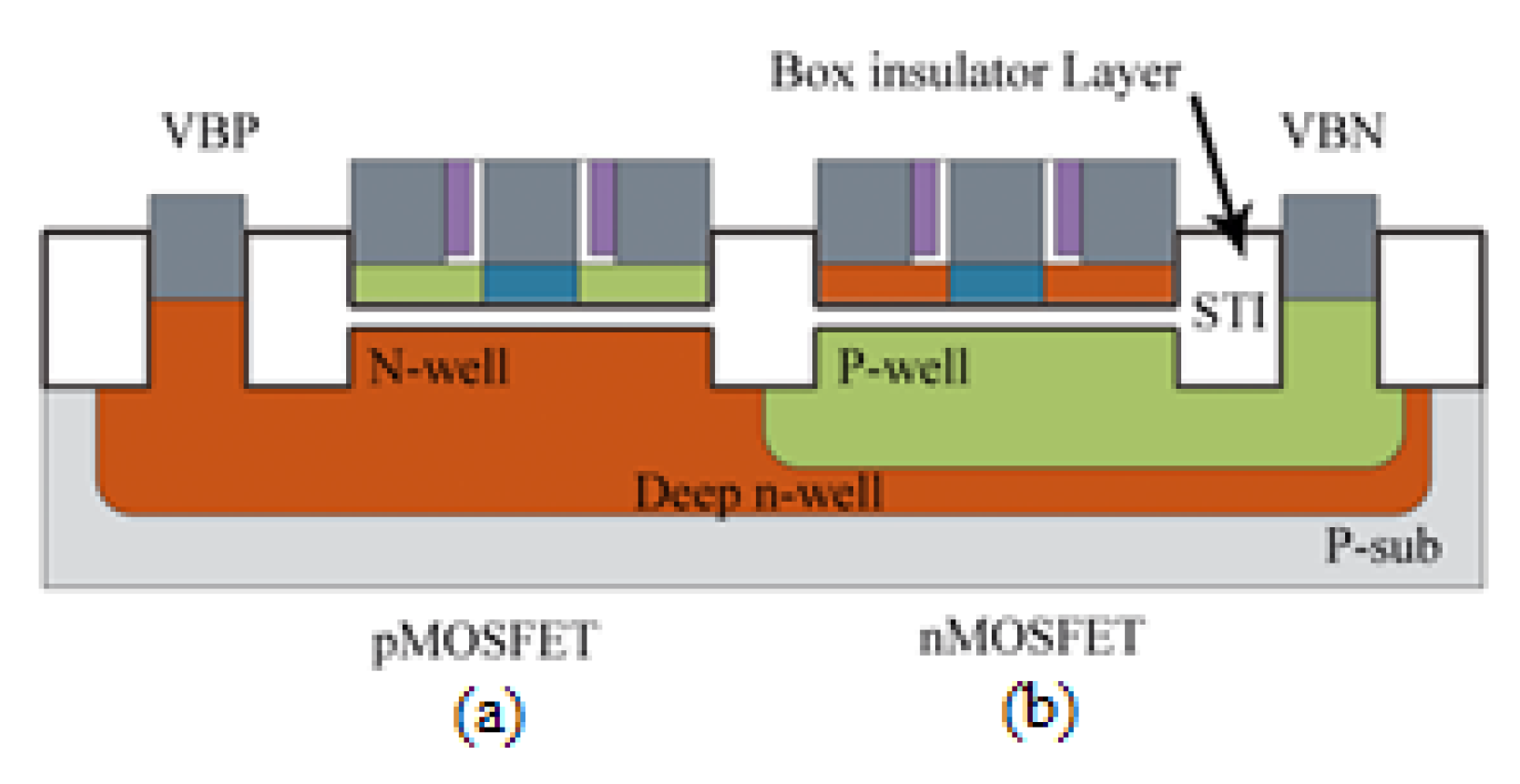
2.1. BB for Silicon on Thin Box
2.2. Related Work
3. Proposed Energy Consumption and Overhead Calculation Models
3.1. Baseline Model
3.2. Double Exponential Waveform Expression
3.3. Switching Impulse Waveform Model Coefficients
4. Optimization
4.1. Problem Definition
4.2. Interior Point Nonlinear Programming Model
4.3. Optimal Frequency
5. Results and Discussion
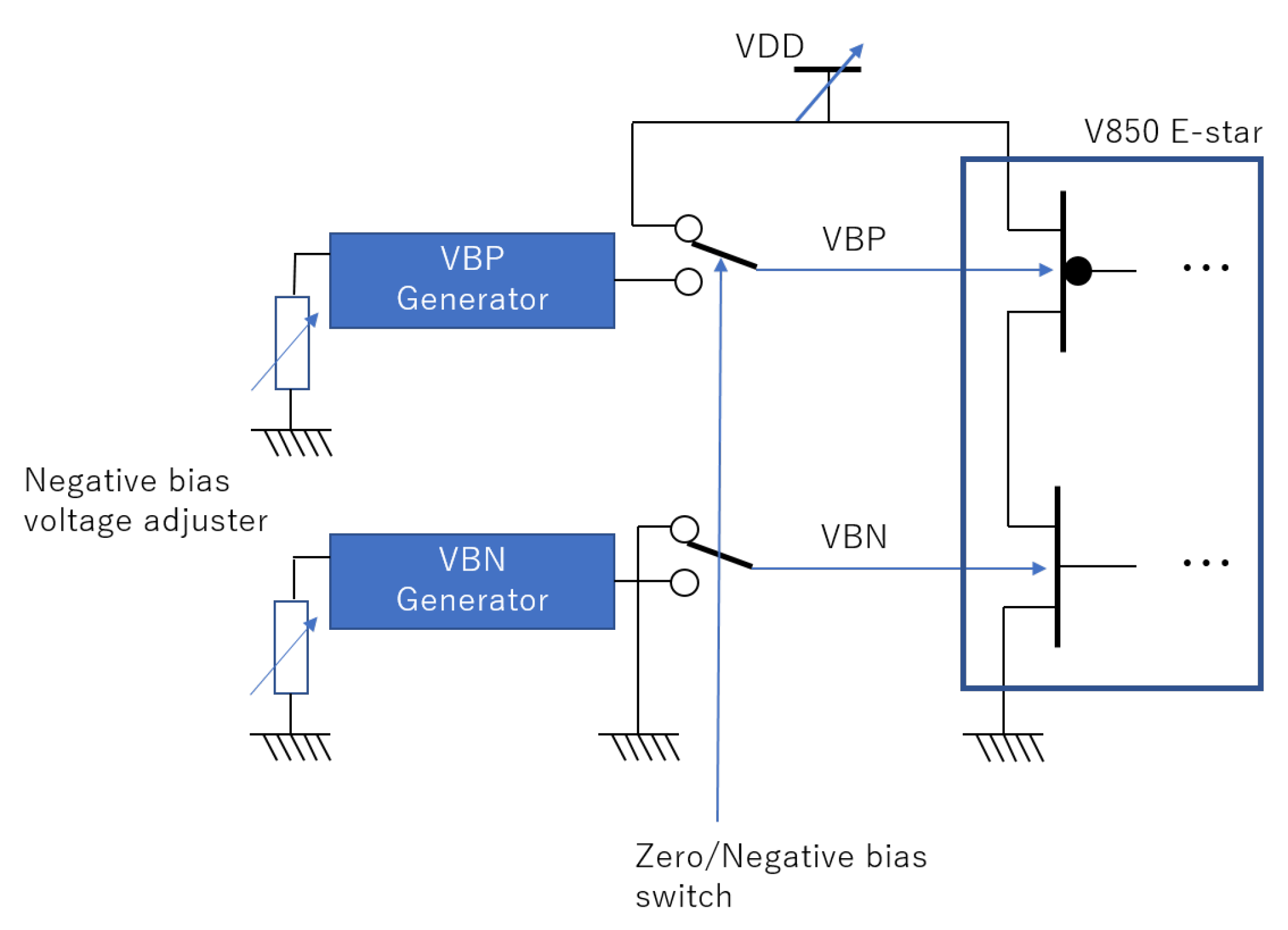
5.1. Target System: V850 E-Star
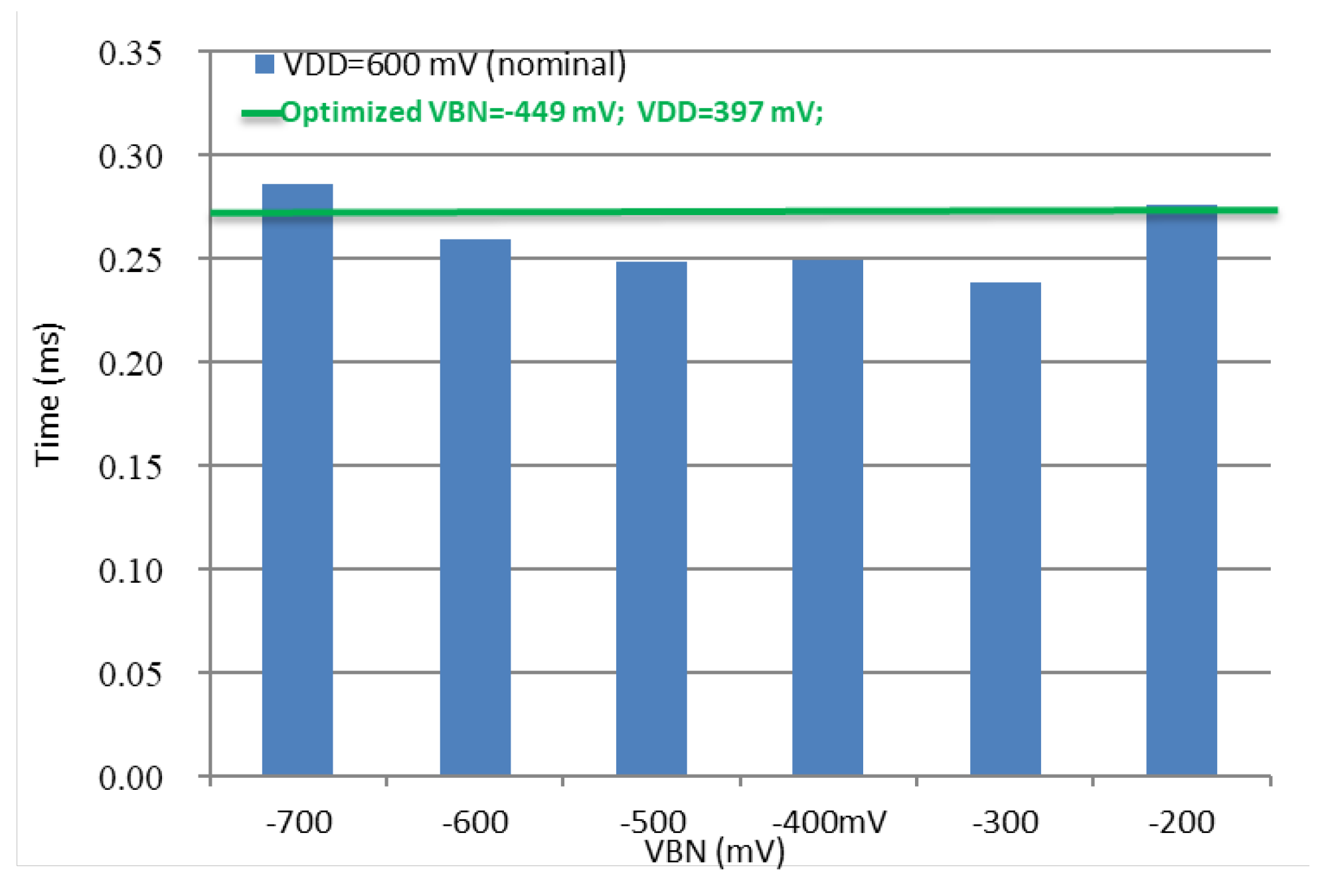
5.2. Break-Even Time
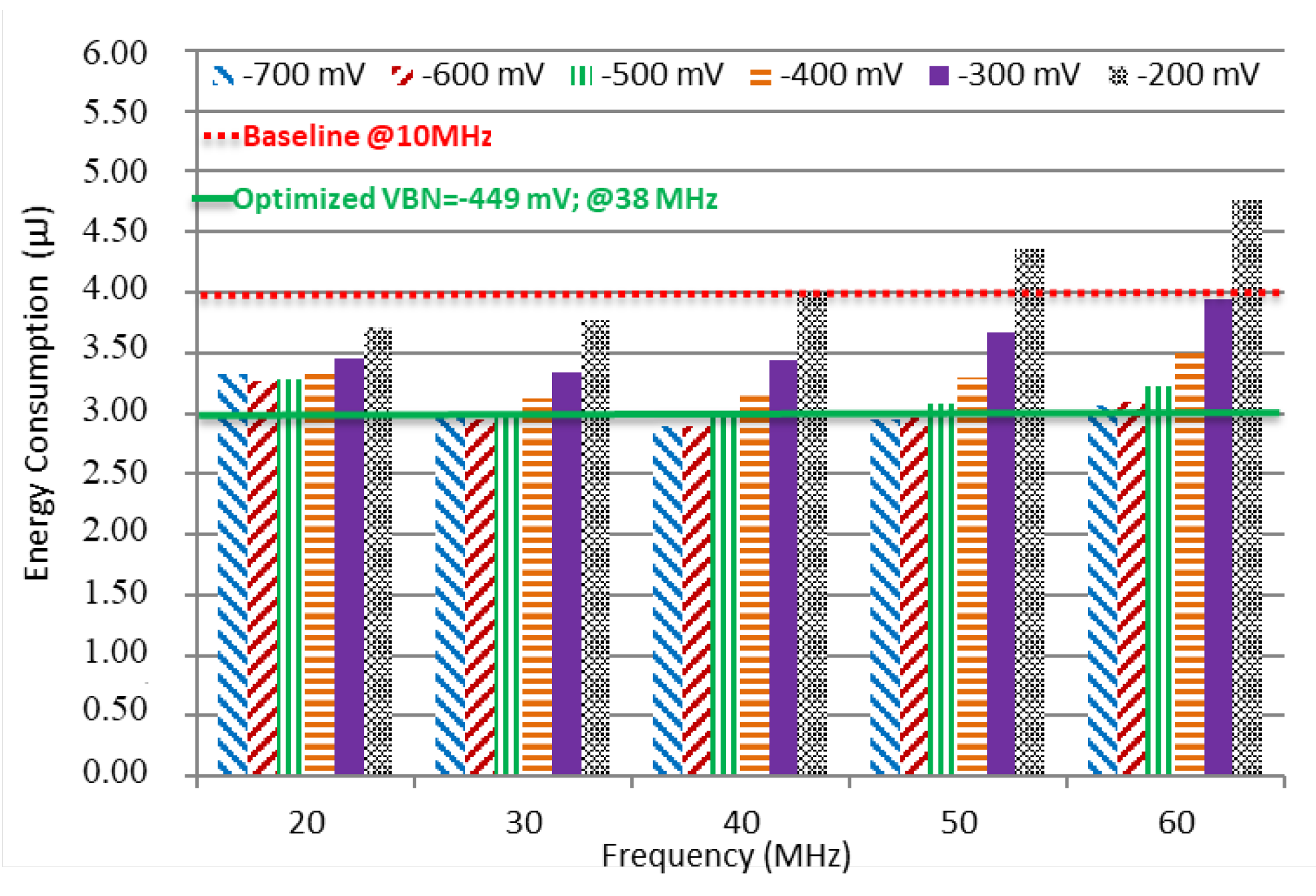
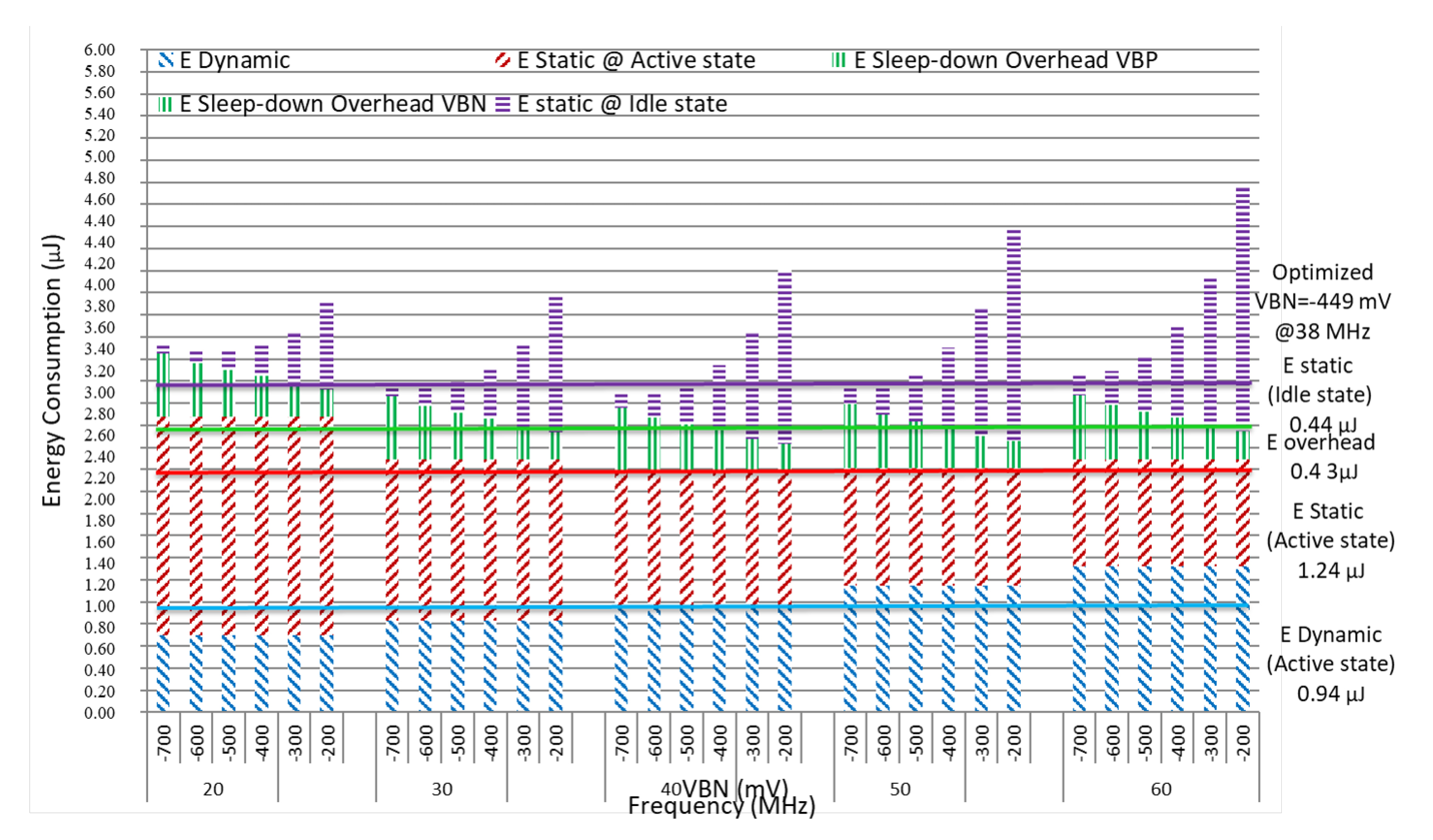
5.3. Optimized VBN–VDD
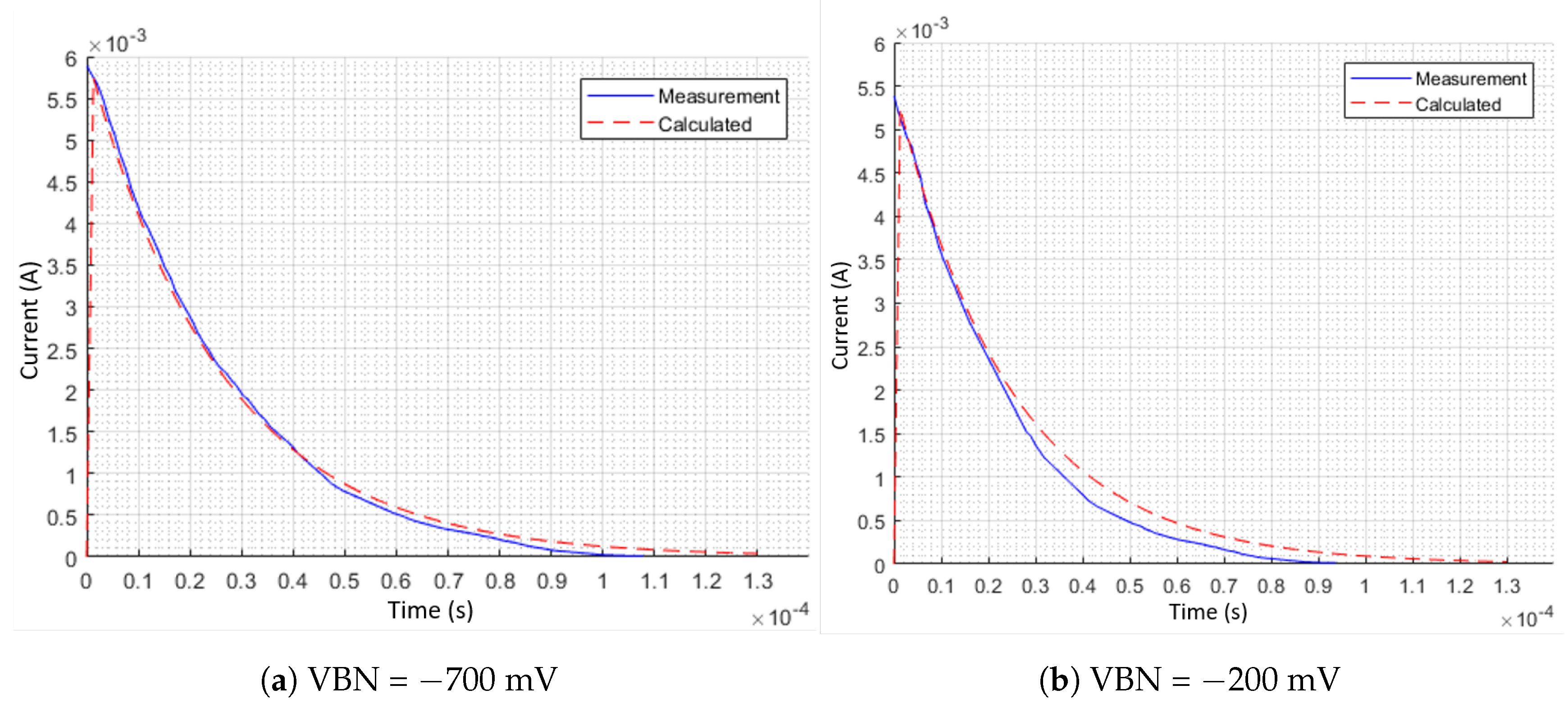
5.4. Model Accuracy
- Mean error. We calculate the error for each VBN coarse voltage, as shown in Table 1. Despite the difference between the real device and the ideal model, the model depicts a close approximation. We achieve a mean error between the analytical model and the real-chip measurement of 10.5%.
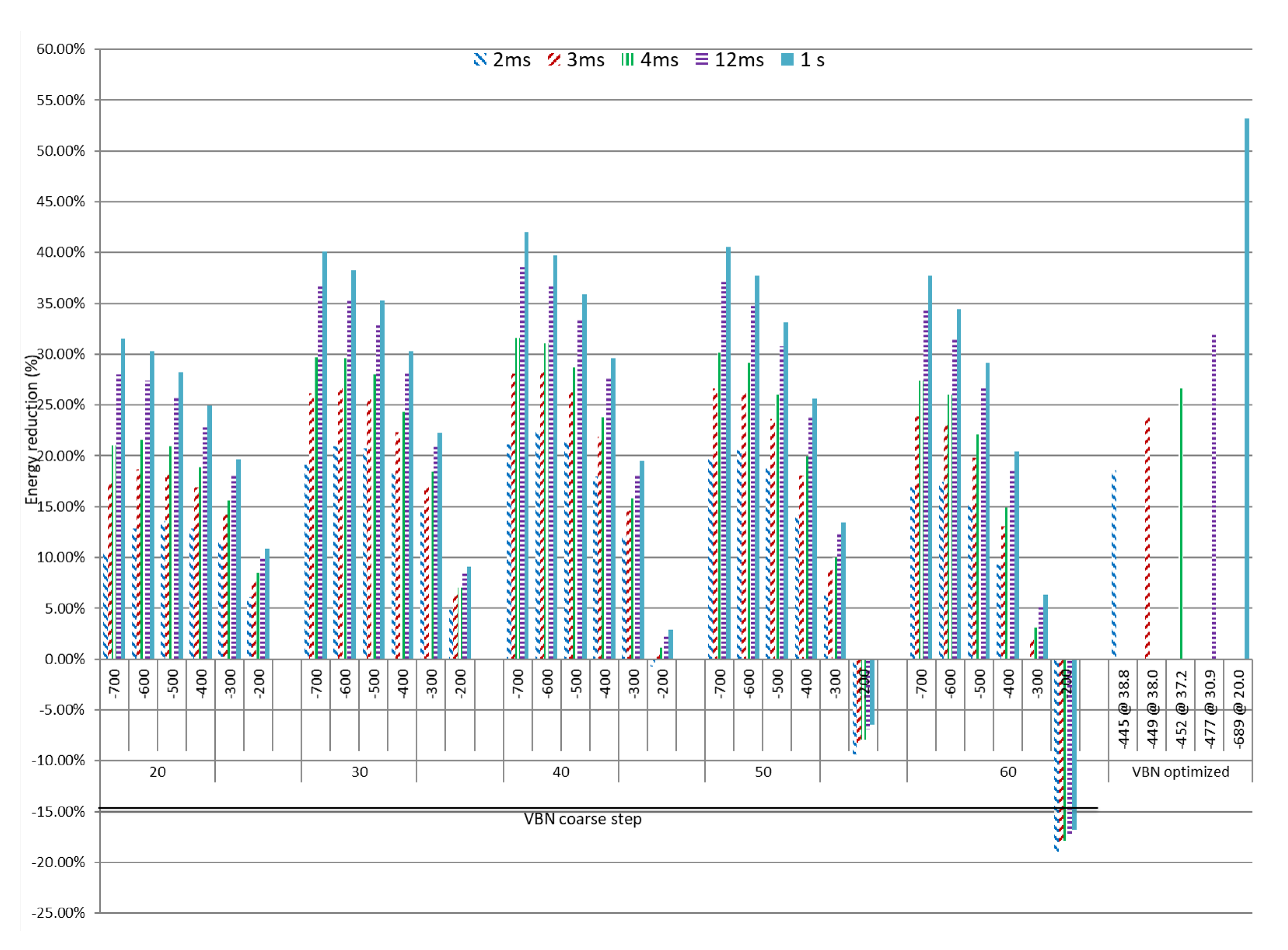
- Effect over the model. Although the model uses the time, the error is a function of the VBN voltage. The time duration of changes slightly; however, it does not have a major effect on the waveform. In contrast, the VBN voltage has major changes (every 100 mV); thus, it affects the result. The maximum error is about 14%, whereas the effect on total energy is about 1.6%. Even though the model has a mean error of about 10%, the energy reduction is substantially increased. As we can see in Figure 10, the energy reduction ratio increases from 17.97% to 18.61%, from 21.86% to 23.78%, from 23.81% to 26.59%, from 27.71% to 32.11%, and from 29.64% to 53.19% for 2 ms, 3 ms, 4 ms, 12 ms, and 1 s, respectively, for decreases in the supply voltage, RBB voltage, and frequency. Thus, the effect of the error over the model is negligible.
6. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Devadas, V.; Aydin, H. DFR-EDF: A Unified Energy Management Framework for Real-Time Systems. In Proceedings of the IEEE Real-Time and Embedded Technology and Applications Symposium, Stockholm, Sweden, 12–15 April 2010; pp. 121–130. [Google Scholar]
- Ikebuchi, D.; Seki, N.; Kojima, Y.; Kamata, M.; Zhao, L.; Amano, H.; Shirai, T.; Koyama, S.; Hashida, T.; Umahashi, Y.; et al. Geyser-1: A MIPS R3000 CPU core with fine grain runtime power gating. In Proceedings of the IEEE Asian Solid-State Circuits Conference, Taipei, Taiwan, 16–18 November 2009; pp. 281–284. [Google Scholar]
- Pillai, P.; Shin, K.G. Real-Time Dynamic Voltage Scaling for Low-Power Embedded Operating Systems. In Proceedings of the Eighteenth ACM Symposium on Operating Systems Principles, Banff, AB, Canada, 21–24 October 2001; pp. 89–102. [Google Scholar]
- Dreslinski, R.G.; Wieckowski, M.; Blaauw, D.; Sylvester, D.; Mudge, T. Near-threshold computing: Reclaiming Moore’s law through energy efficient integrated circuits. Proc. IEEE 2010, 98, 253–266. [Google Scholar] [CrossRef]
- Yan, L.; Luo, J.; Jha, N.K. Joint dynamic voltage scaling and adaptive body biasing for heterogeneous distributed real-time embedded systems. IEEE Trans. Comput. Des. Integr. Circuits Syst. 2005, 24, 1030–1041. [Google Scholar] [CrossRef]
- Okuhara, H.; Kitamori, K.; Fujita, Y.; Usami, K.; Amano, H. An optimal power supply and body bias voltage for a ultra low power micro-controller with silicon on thin box MOSFET. In Proceedings of the IEEE/ACM International Symposium On Low Power Electronics and Design, Rome, Italy, 22–24 July 2015; pp. 207–212. [Google Scholar]
- Ishigaki, T.; Tsuchiya, R.; Morita, Y.; Sugii, N.; Kimura, S.I.; Swart, J.W. Ultralow-power LSI Technology with Silicon on Thin Buried Oxide (SOTB) CMOSFET. In Solid State Circuits Technologies; InTech: London, UK, 2010; pp. 146–156. [Google Scholar]
- Blalock, B.J.; Allen, P.E. Body-driving as low voltage analog design technique for CMOS technology. In Proceedings of the Southwest Symposium on Mixed-Signal Design Iscas, San Diego, CA, USA, 27–29 February 2000; pp. 1–6. [Google Scholar]
- Zhang, K.; Manzawa, Y.; Kobayashi, K. Impact of body bias on soft error tolerance of bulk and Silicon on Thin BOX structure in 65-nm process. In Proceedings of the IEEE International Reliability Physics Symposium, Waikoloa, HI, USA, 1–5 June 2014; pp. 1–4. [Google Scholar]
- Akgul, Y.; Puschini, D.; Lesecq, S.; Beigné, E.; Miro-Panades, I.; Benoit, P.; Torres, L. Power management through DVFS and dynamic body biasing in FD-SOI circuits. In Proceedings of the 51st Annual Design Automation Conference, San Francisco, CA, USA, 1–5 June 2014; pp. 1–6. [Google Scholar]
- Torres, C.C.C.; Okuhara, H.; Ahmed, A.B.; Yamasaki, N.; Amano, H. Analysis of Body Bias Control for Real Time Systems. In Proceedings of the Workshop on Synthesis and System Integration of Mixed Information Technologies, Kyoto, Japan, 24–25 October 2016; pp. 48–53. [Google Scholar]
- Zhou, J.Y.; Boggs, S.A. Low energy single stage high voltage impulse generator. IEEE Trans. Dielectr. Electr. Insul. 2004, 11, 597–603. [Google Scholar] [CrossRef]
- Ueta, G.; Tsuboi, T.; Okabe, S. Evaluation of overshoot rate of lightning impulse withstand voltage test waveform based on new base curve fitting methods-study by assuming waveforms generated in an actual test circuit. IEEE Trans. Dielectr. Electr. Insul. 2010, 17, 1912–1921. [Google Scholar] [CrossRef]
- McConnell, R.A. Amplitude and Energy Spectra of Transient Test Waveforms. In Proceedings of the IEEE EMC International Symposium on Electromagnetic Compatibility, Montreal, QC, Canada, 13–17 August 2001. [Google Scholar]
- Takeda, S.; Miwa, S.; Usami, K.; Nakamura, H. Stepwise Sleep Depth Control for Run-Time Leakage Power Saving. In Proceedings of the great lakes symposium on VLSI, GLSVLSI’12, Boston, MA, USA, 18–20 May 2012. [Google Scholar]
- Cai, H.; Wang, Y.; Naviner, L.A.D.B.; Zhao, W. Robust Ultra-Low Power Non-Volatile Logic-in-Memory Circuits in FD-SOI Technology. IEEE Trans. Circuits Syst. I 2017, 64, 847–857. [Google Scholar] [CrossRef]
- Duarte, D.; Tsai, Y.; Vijaykrishnan, N.; Irwin, M.J. Evaluating run-time techniques for leakage power reduction. In Proceedings of the Asia and South Pacific and the 15th International Conference on VLSI Design, Bangalore, India, 11 January 2002; pp. 31–38. [Google Scholar]
- Keshavarzi, A.; Ma, S.; Narendra, S.; Bloechel, B.; Mistry, K.; Ghani, T.; Borkar, S. Effectiveness of reverse body bias for leakage control in scaled dual Vt CMOS ICs. In Proceedings of the 2001 International Symposium on Low Power Electronics and Design, Huntington Beach, CA, USA, 6–7 August 2001; pp. 207–212. [Google Scholar]
- Tsai, Y.; Duarte, D.E.; Vijaykrishnan, N.; Irwin, M.J. Characterization and modeling of run-time techniques for leakage power reduction. IEEE Trans. Large Scale Integr. Syst. 2004, 12, 1221–1232. [Google Scholar] [CrossRef]
- Torres, C.C.C.; Okuhara, H.; Yamasaki, N.; Amano, H. Analysis of Body Bias Control Using Overhead Conditions for Real Time Systems: A Practical Approach. IEICE Trans. Inf. Syst. 2018, 101, 1116–1125. [Google Scholar] [CrossRef] [Green Version]
- Cortes, C.; Amano, H. Switching Region Analysis for SOTB Technology. In Proceedings of the International Caribbean Conference on Devices, Circuits and Systems, Cozumel, Mexico, 5–7 June 2017; pp. 33–36. [Google Scholar]
- Cortes, C.; Amano, H.; Yamasaki, N. Break Even Time Analysis Using Empirical Overhead Parameters for Embedded Systems on SOTB Technology. In Proceedings of the Design of Circuits and Integrated Systems Conference, Barcelona, Spain, 22–24 November 2017. [Google Scholar]
- Clerc, S.; Saligane, M.; Abouzeid, F.; Cochet, M.; Daveau, J.M.; Bottoni, C.; Bol, D.; De-Vos, J.; Zamora, D.; Coeffic, B.; et al. 8.4 A 0.33V40∘C Process/Temperature Closed-Loop Compensation SoC Embedding All-Digital Clock Multipller and DC-DC Converter Exploiting FDSOI 28nm Back-Gate Biasing. In Proceedings of the International Solid-State Circuits Conference (ISSCC), San Francisco, CA, USA, 22–26 February 2015; pp. 150–151. [Google Scholar]
- Okuhara, H.; Ahmed, A.B.; Amano, H. Digitally Assisted On-Chip Body Bias Tuning Scheme for Ultra Low-Power VLSI systems. IEEE Trans. Circuits Syst. I 2018, 65, 3241–3253. [Google Scholar] [CrossRef]
- Blagojevi, M.; Cochet, M.; Keller, B.; Flatresse, P.; Vladimirescu, A.; Nikolić, B. A Fast, Flexible, Positive and Negative Adaptive Body-Bias Generator in 28nm FDSOI. In Proceedings of the IEEE Symposium on VLSI Circuits, Honolulu, HI, USA, 15–17 June 2016. [Google Scholar] [CrossRef]
- Hoppner, S.; Eisenreich, H.; Walter, D.; Scharfe, A.; Oefelein, A.; Schraut, F.; Oefelein, A.; Schraut, F.; Schreiter, J.; Riedel, T.; et al. Adaptive Body Bias Aware Implementation for Ultra-Low-Voltage Designs in 22FDX Technology. IEEE Trans. Circuits Syst. II Express Briefs 2019. [Google Scholar] [CrossRef]
- Ramarao, G.; Chandrasekaran, K. Calculation of Multistage Impulse Circuit and Its Analytical Function Parameters. Int. J. Pure Appl. Math. 2017, 114, 583–592. [Google Scholar]
- Camp, M.; Garbe, H. Parameter Estimation of Double Exponential Pulses (EMP, UWB) With Least Squares and Nelder Mead Algorithm. IEEE Trans. Electromagn. Compat. 2004, 46, 675–678. [Google Scholar] [CrossRef]
- Nelder, J.; Mead, R. A Simplex Method for Funtion Minimization. Comput. J. 1965, 7, 308–313. [Google Scholar] [CrossRef]
- Rao, B.V.; Kumar, G.N.; Kumari, R.L.; Raju, N.G.S. Optimization of a power system with Interior Point method. In Proceedings of the International Conference on Power and Energy Systems, Chennai, India, 22–24 December 2011. [Google Scholar]
- Yang, X. Engineering Optimization Introduction, An Applications, Metaheuristic; Wiley: Hoboken, NJ, USA, 2010; Chaper 6. [Google Scholar]
- Math Works. MATLAB: The Language of Technical Computing from Math Works; Math Works: Natick, MA, USA, 2018. [Google Scholar]
- Weste, N.H.E.; Harris, D.M. Power in CMOS VLSI Design, 4th ed.; Addison-Wesley-Pearson: Boston, MA, USA, 2011. [Google Scholar]
- Kitamori, K.; Su, H.; Amano, H. Power optimization of a micro-controller with Silicon On Thin Buried Oxide. In Proceedings of the 18th Workshop on Synthesis And System Integration of Mixed Information technologies, Sapporo, Japan, 21–22 October 2013; pp. 68–73. [Google Scholar]
- NEC Corporation. V800 Series Multimedia RISC Microcomputers Pave the Way for System On a Chip, 12th ed.; NEC Corporation: Tokyo, Japan, 2000. [Google Scholar]
- Renesas Electronics Corporation. V850/SC1TM, V850/SC2TM, V850/SC3TM. 32-Bit Single-Chip Microcontrollers. In User’s Manual. RENESAS, 3rd ed.; Renesas Electronics Corporation: Tokyo, Japan, 2010. [Google Scholar]
- Okuhara, H.; Fujita, Y.; Usami, K.; Amano, H. Power Optimization Methodology for Ultralow Power Microcontroller With Silicon on Thin BOX MOSFET. IEEE Trans. Large Scale Integr. (VLSI) Syst. 2017, 25, 1578–1582. [Google Scholar] [CrossRef]
- Krauss, T.A. Planar Electrostatically Doped Reconfigurable Schottky Barrier FDSOI Field-Effect Transistor Structures. Ph.D. Thesis, Technical University of Darmstadt, Darmstadt, Germany, 2017. [Google Scholar]
- PARFAIT: Power-aware AmbipolaR Fpga ArchITecture. Available online: https://www.itiv.kit.edu/english/5497.php (accessed on 10 January 2020).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| VBN (mV) | Real Chip (J) | Model Anal. (J) | Error (%) |
|---|---|---|---|
| −700 | 0.578 | 0.626 | 7.66 |
| −600 | 0.489 | 0.558 | 12.46 |
| −500 | 0.424 | 0.483 | 12.10 |
| −400 | 0.373 | 0.414 | 9.82 |
| −300 | 0.293 | 0.341 | 14.18 |
| −200 | 0.250 | 0.264 | 5.31 |
| Group | Variables |
|---|---|
| Optimization | |
| target variables | |
| Application | |
| coefficient variables | D, N, , , |
| (given by the application) | |
| System | |
| coefficient variables | I, A, B, , C, , , |
| (given by the system) | |
| Measured | |
| variables | , |
| Coefficient | Core | Memory |
|---|---|---|
| I | ||
| A | 0.5192 | 0.4517 |
| B | 1.7926 | 2.1563 |
| F | ||
| 0.1110 | 0.0681 | |
| Deadline (ms) | VDD (mV) | VBN (mV) | Frequency (MHz) |
|---|---|---|---|
| 2 | 399 | −445 | 38.86 |
| 3 | 397 | −449 | 38.06 |
| 4 | 394 | −452 | 37.28 |
| 12 | 375 | −477 | 30.94 |
| 1000 | 341 | −689 | 20.00 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cortes Torres, C.C.; Yasudo, R.; Amano, H. Body Bias Optimization for Real-Time Systems. J. Low Power Electron. Appl. 2020, 10, 8. https://doi.org/10.3390/jlpea10010008
Cortes Torres CC, Yasudo R, Amano H. Body Bias Optimization for Real-Time Systems. Journal of Low Power Electronics and Applications. 2020; 10(1):8. https://doi.org/10.3390/jlpea10010008
Chicago/Turabian StyleCortes Torres, Carlos C., Ryota Yasudo, and Hideharu Amano. 2020. "Body Bias Optimization for Real-Time Systems" Journal of Low Power Electronics and Applications 10, no. 1: 8. https://doi.org/10.3390/jlpea10010008
APA StyleCortes Torres, C. C., Yasudo, R., & Amano, H. (2020). Body Bias Optimization for Real-Time Systems. Journal of Low Power Electronics and Applications, 10(1), 8. https://doi.org/10.3390/jlpea10010008