
Reliability Study of BEV Powertrain System and Its Components—A Case Study

Abstract
:1. Introduction
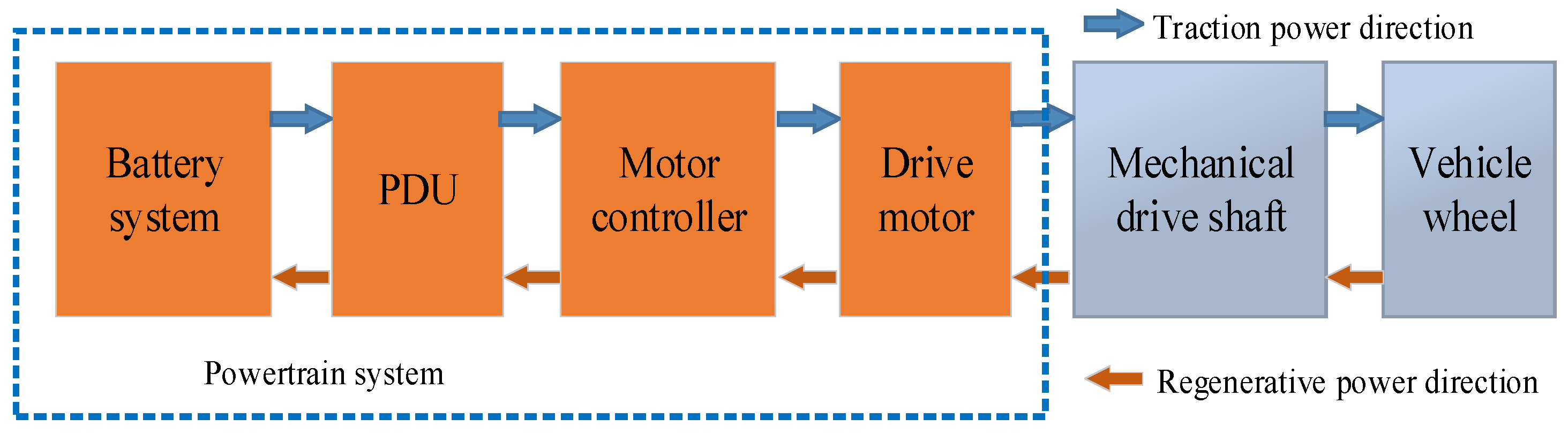
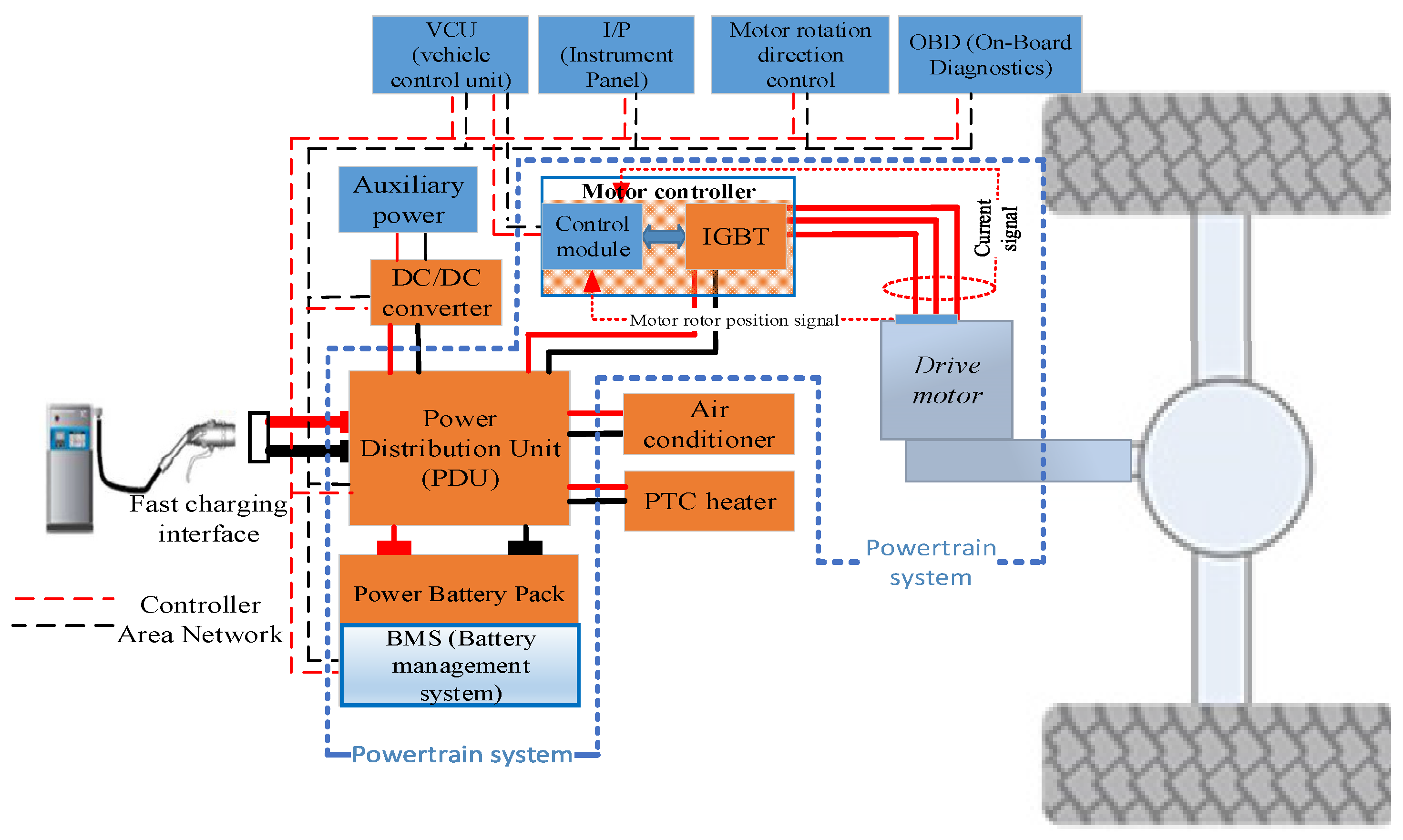
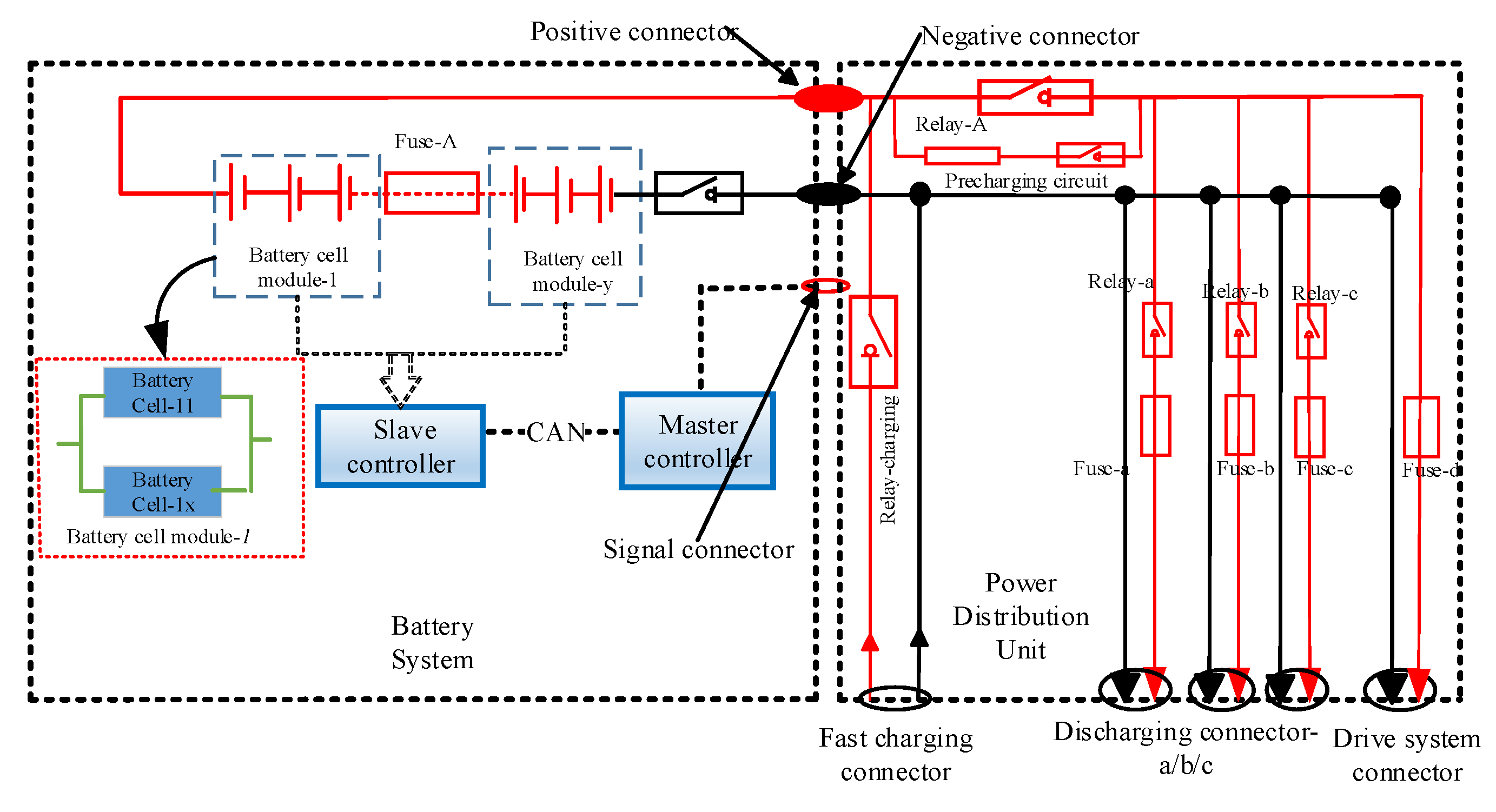
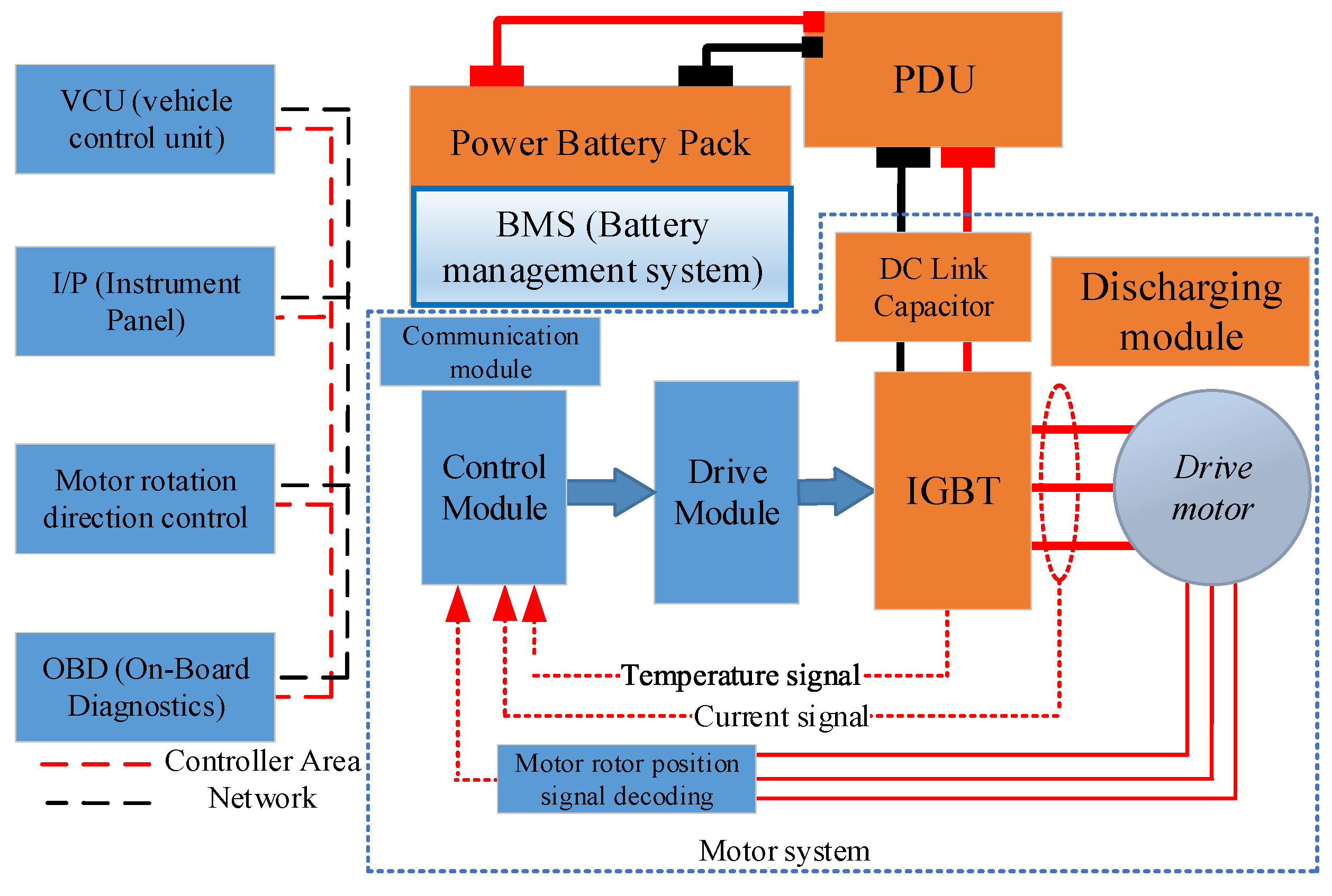
2. The Powertrain System in BEVs
3. Reliability Study of Powertrain System
4. Case Study
4.1. Failure Rates of Powertrain Components
- (1)
- In the battery system, the failure rate of the battery module is the highest and can be as high as 3.453, followed by the BMS master controller and the BMS slave controller with failure rates of 1.70010 and 1.6324, respectively. Power electronic devices are relatively reliable in battery systems and have the lowest failure rate (of 0.9213).
- (2)
- The faults of the PDU are mainly caused by relays, fuses, and connectors. The failure rate of the fuse in this study is the highest, up to 0.75, followed by the relay with a failure rate of 0.187. By contrast, the connectors are free of faults and have the lowest failure rate in the PDU.
- (3)
- Among all the modules of the motor controller, the control module has the highest failure rate, as high as 1.884; conversely, the failure rate of the discharging module is the lowest, as low as 0.2815. The driver module, communication module, and other components also tend to develop faults in operation, but their failure rates vary in the range of 1.4948–0.282.
- (4)
- Drive motor failures are primarily caused by bearings, stators, rotor windings, etc. From the research results, it was found that the oil seal of the bearing is the most vulnerable part in the drive motor (failure rate of 0.4465), followed by the position sensor and rotor/stator windings; their failure rates change in the range of 0.0252–0.0375. The temperature sensor is also prone to fail in operation. By contrast, the spline and shaft are relatively more reliable.
- (5)
- From the perspective of the entire powertrain system, the battery module is the most vulnerable part (its failure rate is as high as 3.2), followed by the control module SMCs and drive module SMCs of the motor controller, which have failure rates of 1.6257 and 1.3907, respectively.
4.2. Reliability Assessment of Powertrain System
- (1)
- All the components and subsystems in the powertrain system will become more and more unreliable with increases in their service time, i.e., the longer their service time, the lower their reliability indices tend to be. This agrees very well with the research conclusions obtained from the failure rate calculation results in Table 3 and Table 4.
- (2)
- From the perspective of the entire powertrain system, the battery system is much less reliable than the other subsystems, followed by the motor controller and drive motor; by contrast, the PDU is relatively more reliable. For example, after the powertrain system has run continuously for 10,000 h, the reliability index of the battery system, PDU, motor controller, and drive motor are 0.396, 0.887, 0.549, and 0.824, respectively (shown in Figure 8e). The most important point is that regardless of service time, the calculation results for the reliability index of the entire powertrain system are much lower than the corresponding values for the reliability indices of other, single components. For example, after the powertrain system has run continuously for 125,000 h, its reliability is about one-third that of the battery system, and less than one-eighth that of the PDU. This further indicates that we should take into account all the components when evaluating the reliability of the powertrain system, because the failure of any single component in the powertrain can, to varying degrees, affect the reliability of the entire system.
- (3)
- Among the components of all subsystems of the BEV powertrain system, the battery module is the most unreliable component in the battery system, fuses are the most unreliable parts in the PDU, and the control module is the most unreliable component in the motor controller; their reliability indices are 0.396, 0.887, 0.549, and 0.824, respectively, after the powertrain system has run continuously for 250,000 h (shown in Figure 8a–d).
- (4)
- The battery module is the most unreliable component in not only the battery system, but the entire powertrain system; conversely, the connector is the most reliable component in the entire system.
5. Conclusions
- The reliability of the powertrain system and its subsystems will decrease gradually as their time in service increases. However, the reliability of the powertrain system decreases faster than any of the subsystems. For example, after the powertrain system has run continuously for 125,000 h, its reliability is about one-third that of the battery system and less than one-eighth that of the PDU.
- From the view of the entire BEV powertrain system, the battery module is the most vulnerable part in not only the battery system, but the entire powertrain system (failure rate of 3.076), followed by the control module and drive module of the motor controller (failure rates of 2.234 and 1.741, respectively), the BMS master controller (failure rate of 1.701), and BMS slave controller (failure rate of 1.632). Among the subsystems in a BEV powertrain, the battery module is the most vulnerable part in the battery system; the fuse is the most vulnerable part in the PDU; the control module is the most vulnerable part in the motor controller; and the oil seal of the bearing is the most vulnerable part in the drive motor.
- The research results in this paper also suggest that, due to the finding that the battery system and motor controller were much more unreliable than other system components, more care should be paid in the future reliability design of BEV powertrain systems to foster improvements in the overall reliability of electric vehicles.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Component or Part | Model/Specification | Number | Part | Model/Specification | Number |
|---|---|---|---|---|---|
| Component or part of battery system | |||||
| Positive connector for main circuit | EVH1-F1ZK-M8A | 1 | Negative relay for main circuit | EV200 | 1 |
| Negative connector for main circuit | EVH1-F1ZK-M8B | 1 | Positive relay for main circuit | HFZ16V-50-900 | 1 |
| Signal connector for battery system | Amphenol12492 | 1 | Fuse for main circuit | MSD | 1 |
| Current sensor | PL-2/75 Mv 400 A | 1 | Signal connectors for battery cells | Amphenol-TP1 | 96 |
| Temperature sensor | NTC10K | 10 | Master controller of BMS | BCU0V3 | 1 |
| Voltage sensor | R34-7 | 1 | Slave controller of BMS | BMU1V1 | 1 |
| Fastening screw for battery module | M6 | 97 | Battery Cell | 18650 | 85S5P |
| Component or part of PDU | |||||
| Main circuit fuse | URSU5-250 | Positive relay for main circuit | HFE82 | 1 | |
| Positive connector for main circuit output | EVH1-F1ZK-M8A | 2 | Negative connector for main circuit | EVH1-F1ZK-M8B | 2 |
| Component or part of motor controller | |||||
| Control module | NA | 1 | Drive module | NA | 1 |
| Communication module | NA | 1 | Discharging module | NA | 1 |
| IGBT | FS400R07A3E3 | 1 | DC Link capacitor | C362H557K19802 | 1 |
| Current failure sensor | PL-2/75 mV 200 A | 2 | |||
| Component or part of drive motor | |||||
| Hexagonal socket head cap screw | M6 × 20-12.9- NiZn/M6 × 12-NiZn | 28 | O-rings | 104 × 2.65GB/T 3452.1 | 2 |
| Oil seal | TC 40 × 52 × 8 Fluorine rubber | 2 | Position sensor | TS2225N1994E102 | 1 |
| Elastic ring for shaft | GB/T 894.1 40 | 2 | Winding | Wire diameter-7 mm | 1 |
| Deep-groove ball bearing | 6206-2Z/C3, WT | 2 | Temperature sensor | PT1000 | 2 |
| Name | Controller Module | Driver Module | Communication Module | Discharging Module | BMS Master Controller | BMS Slave Controller |
|---|---|---|---|---|---|---|
| PCB layer coefficient | 1.4 | 1.4 | 1 | 1 | 1.4 | 1.4 |
| PCB layers | 4 | 4 | 1 | 1 | 4 | 4 |
| Track width of PCB | 0.23 | 0.6 | 0.35 | 0.6 | 0.35 | 0.35 |
| Track width factor of PCB | 3 | 1 | 2 | 1 | 2 | 2 |
| Number of SMCs | 553 | 368 | 38 | 24 | 386 | 463 |
| Number of THCs | 0 | 0 | 0 | 4 | 4 | 4 |
| Surface area of PCB | 104 | 104 | 25 | 23 | 154 | 160 |
| Components | Type of Package | Single Device Failure Rate/FPMH | Number of SMCs on Controller Module | Number of SMCs on Driver Module | Number of SMCs on Communication Module | Number of SMCs on Discharging Module | BMS Master Controller | BMS Slave Controller |
|---|---|---|---|---|---|---|---|---|
| Capacitor | 0603-C/RB.3.6 | 0.00306/0.065 | 235 | 136 | 9 | 4 | 146 | 87 |
| Diode | SOD/SOT | 0.00554 | 49 | 64 | 5 | 3 | 19 | 21 |
| Op-amp chip | TSSOP | 0.01263 | 14 | 4 | 0 | 0 | 2 | 4 |
| Inductance | MSS | 0.06762 | 20 | 21 | 8 | 2 | 3 | 3 |
| MOSFET | SOT/DPAK | 0.059700 | 11 | 11 | 2 | 0 | 8 | 5 |
| Resistance | 0603-R | 0.00018 | 223 | 123 | 13 | 10 | 156 | 98 |
| Master chip | LQFP144 | 0.30950 | 1 | 0 | 0 | 0 | 1 | 1 |
| Optocoupler | SO8 | 0.08100 | 0 | 3 | 0 | 0 | 4 | 8 |
| Transformer | CEER117 | 0.013100 | 0 | 6 | 0 | 1 | 0 | 0 |
| Power MOSFET | D-PAK | 0.07500 | 0 | 0 | 0 | 4 | 0 | 0 |
| Communication chip | TSSOP | 0.12600 | 0 | 0 | 1 | 0 | 2 | 4 |
References
- Shi, S.; Zhang, H.; Yang, W.; Zhang, Q.; Wang, X. A life-cycle assessment of battery electric and internal combustion engine vehicles: A case in Hebei Province, China. J. Clean. Prod. 2018, 228, 606–618. [Google Scholar] [CrossRef]
- Suganya, S.; Raja, S.C.; Venkatesh, P. Simultaneous coordination of distinct plug-in Hybrid Electric Vehicle charging stations: A modified Particle Swarm Optimization approach. Energy 2017, 138, 92–102. [Google Scholar] [CrossRef]
- China Association of Automobile Manufacture. Current Status of the Electric Vehicle Industry. 2019. Available online: http://www.caam.org.cn.22 (accessed on 20 January 2019).
- China Electric Vehicle Research Alliance. 2019. Available online: http://biz.touchev.com/industry_data.24 (accessed on 15 May 2019).
- China Electric Vehicle Resources Network. Electric Vehicle Sales. 2019. Available online: http://www.evpartner.com/ZYC/.23 (accessed on 20 January 2019).
- Shu, X.; Yang, W.; Guo, Y.; Wei, K.; Qin, B.; Zhu, G. A reliability study of electric vehicle battery from the perspective of power supply system. J. Power Sources 2020, 451, 1–11. [Google Scholar] [CrossRef]
- Liu, Z.; Tan, C.; Leng, F. A reliability-based design concept for lithium-ion battery pack in electric vehicles. Reliab. Eng. Syst. Saf. 2015, 134, 169–177. [Google Scholar] [CrossRef]
- Xia, Q.; Wang, Z.; Ren, Y.; Sun, B.; Yang, D.; Feng, Q. A reliability design method for a lithium-ion battery pack considering the thermal disequilibrium in electric vehicles. J. Power Sources 2018, 386, 10–20. [Google Scholar] [CrossRef]
- Kang, Y.; Duan, B.; Zhou, Z.; Shang, Y.; Zhang, C. A multi-fault diagnostic method based on an interleaved voltage measurement topology for series connected battery packs. J. Power Sources 2019, 417, 132–144. [Google Scholar] [CrossRef]
- Xia, B.; Mi, C. A fault-tolerant voltage measurement method for series connected battery packs. J. Power Sources 2016, 308, 83–96. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, Y.; Yang, D.; Chen, Z. An on-line estimation of battery pack parameters and state-of-charge using dual filters based on pack model. Energy 2016, 115, 219–229. [Google Scholar] [CrossRef]
- Wang, L.; Sun, Y.; Wang, X.; Wang, Z.; Zhao, X. Reliability Modeling Method for Lithium-ion Battery Packs Considering the Dependency of Cell Degradations Based on a Regression Model and Copulas. Materials 2019, 12, 1054. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Tian, G.; Liang, Y.; Qiang, T. Reliability modeling and evaluation of electric vehicle motor by using fault tree and extended stochastic petri nets. J. Appl. Math. 2014. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Liang, Y.; Yang, C.; Sang, Z. Reliability modeling and assessment of electric vehicle motor using fault tree and Fuzzy Petri Nets. Int. J. Grid Distrib. Comput. 2016, 9, 121–136. [Google Scholar] [CrossRef]
- Zhu, X.H.; Cui, S.M.; Shi, N.; Min, Y.L. Grey prediction model of motor reliability of electric vehicle. Electr. Mach. Control. 2012, 16, 42–46. [Google Scholar]
- Shu, X.; Guo, Y.; Yang, W.; Wei, K.; Zhu, Y.; Zou, H. A detailed reliability study of the motor System in pure electric vans by the approach of fault tree analysis. IEEE Access 2019, 8, 5295–5307. [Google Scholar] [CrossRef]
- Nordelöf, A.; Grunditz, E.; Lundmark, S.; Tillman, A.M.; Alatalo, M.; Thiringer, T. Life cycle assessment of permanent mag-net electric traction motors. Transp. Res. Part D 2019, 67, 263–274. [Google Scholar] [CrossRef]
- Song, Y.; Wang, B. Survey on reliability of power electronic systems. IEEE Trans. Power Electron. 2013, 28, 591–604. [Google Scholar] [CrossRef]
- Liu, H.; Shi, E.; Wang, W. Reliability analysis of the optimized Y-source inverter with clamping circuit. Microelectron. Reliab. 2019, 100, 113420. [Google Scholar] [CrossRef]
- Setoya, T.; Ogura, T.; Saito, W.; Matsudai, T.; Endo, K. Destruction failure analysis and international reliability test standard for power devices. Microelectron. Reliab. 2015, 55, 1932–1937. [Google Scholar] [CrossRef]
- Bahrebar, S.; Zhou, D.; Rastayesh, S.; Wang, H.; Blaabjerg, F. Reliability assessment of power conditioner considering maintenance in a PEM fuel cell system. Microelectron. Reliab. 2018, 88–90, 1177–1182. [Google Scholar] [CrossRef]
- Štatkić, S.; Jeftenić, I.B.; Bebić, M.Z.; Milkić, Ž.; Jović, S. Reliability assessment of the single motor drive of the belt conveyor on Drmno open-pit mine. Int. J. Electr. Power Energy Syst. 2019, 113, 393–402. [Google Scholar] [CrossRef]
- Jokanović, B.; Bebić, M.; Kartalović, N. The influence of combined strain and constructive solutions for stator insulation of rotating electrical machines on duration of their reliable exploitation. Int. J. Electr. Power Energy Syst. 2019. [Google Scholar] [CrossRef]
- Shu, X.; Guo, Y.; Yang, H.; Wei, K. Reliability Study of Motor Controller in Electric Vehicle by the Approach of Fault Tree Analysis. Eng. Fail. Anal. 2021, 121, 105165. [Google Scholar] [CrossRef]
- Khalilzadeh, M.; Fereidunian, A. A Markovian approach applied to reliability modeling of bidirectional DC-DC converters used in PHEVs and smart grids. Iran. J. Electr. Electron. Eng. 2016, 4, 301–313. [Google Scholar]
- Wang, L.; Liao, A.; Ding, Y. Reliability evaluation of rolling bearings for traction motors of bogies based on proportional hazards model. Meas. Control Technol. 2018, 31, 14–19. [Google Scholar]
- IEC TR62308-2004. Reliability Date Handbook-Universal Model for Reliability Prediction of Electronic-Components, PCBs and Equipment; International Electro Technical Commission: Geneva, Switzerland, 2004. [Google Scholar]
- FIDES Guide 2009 Edition A. Reliability Methodology for Electronic Systems. 2009. Available online: https://www.itemsoft.com/iqt_fides.html (accessed on 24 April 2021).
- MIL-HDBK-217F. Military Handbook: Reliability Prediction of Electronic Equipment. 1990. Available online: https://www.quanterion.com/wp-content/uploads/2014/09/MIL-HDBK-217F.pdf (accessed on 4 April 2019).
- NSW-2009. Handbook of Reliability Prediction Procedures for Mechanical Equipment. In Naval Surface Warfare Center Carderock Division; Naval Surface Warfare Center: West Bethesda, MD, USA, 2009. [Google Scholar]
- Essayed, E.A. Reliability Engineering, 2nd ed.; Publishing Housing of Electronics Industry: Beijing, China, 2012; pp. 99–104. [Google Scholar]








| Intermediate Event | Code | Failure Rate | Basic Event | Code | Failure Rate |
|---|---|---|---|---|---|
| Battery system failure (S1) | |||||
| Failure of battery module | gb1 | Failure of signal connector for battery system | eb1 | ||
| Failure of battery cells | eb2 | ||||
| Failure of signal connectors for battery cells module | eb3 | ||||
| Failure of master controller of BMS | gb2 | Failure of PCB for master controller | eb4 | ||
| Failure of SMCs for master controller | eb5 | ||||
| Failure of slave controller of BMS | gb3 | Failure of PCB for slave controller | eb6 | ||
| Failure of SMCs for slave controller | eb7 | ||||
| Failure of power electronic device | gb4 | Failure of fuse for main circuit | eb8 | ||
| Failure of relay for main circuit | eb9 | ||||
| Failure of sensors | gb5 | Failure of current sensor | eb10 | ||
| Failure of voltage sensor | eb11 | ||||
| Failure of temperature sensor | eb12 | ||||
| Power distribution unit failure (S2) | |||||
| Power distribution unit failure (S2) | Failure of relay | ep1 | |||
| Failure of fuse | ep2 | ||||
| Failure of connector | ep3 | ||||
| Motor controller failure (S3) | |||||
| Failure of control module | gc1 | PCB failure of control module | ec1 | ||
| SMCs failure of control module | ec2 | ||||
| Failure of driver module | gc2 | Failure of driver module PCB | ec3 | ||
| Failure of driver module SMCs | ec4 | ||||
| Failure of discharging module | gc3 | Failure of discharging module PCB | ec5 | ||
| Failure of discharging module SMCs | ec6 | ||||
| Failure of communication module | gc4 | Failure of communication module PCB | ec7 | ||
| Failure of communication module SMC | ec8 | ||||
| Failure of other controller components | gc5 | DC link capacitor failure | ec9 | ||
| IGBT failure | ec10 | ||||
| Failure of drive motor (S4) | |||||
| Rotor failure | gm1 | Failure of rotor armature winding | em1 | ||
| Failure of rotor shaft | em2 | ||||
| Stator failure | gm2 | Failure of stator winding | em3 | ||
| Failure of stator core | em4 | ||||
| Transducer failure | gm3 | Failure of temperature sensor | em5 | ||
| Failure of position sensor | em6 | ||||
| Failure of other motor components | gm4 | Failure of spline | em7 | ||
| Failure of bearing oil seal | em8 | ||||
| Failure of bearing | em9 | ||||
| Items | Parameters | Items | Parameters |
|---|---|---|---|
| Motor type | Asynchronous induction | Controller capacity | 70 KVA |
| Maximum output power | 35 kW | Maximum working voltage | DC450 V |
| Maximum speed | 9000 rpm | Frequency range | 0~600 Hz |
| Peak torque | 150 Nm | Peak point current | 250 A |
| Nominal voltage | AC227 V | Controller nominal voltage | DC320 V |
| Nominal voltage of cell (V) | 3.68 | The number of total battery cells connected in parallel in battery system | 5 |
| Operating voltage range of cell (V) | 2.9–4.0 | Nominal voltage of battery system | 312.8 V |
| The number of total battery cells connected in series in battery system | 85 | Total energy of battery pack | 25.9 kwh |
| Continuous charging current | 1.5 C | Continuous discharge current | 1 C |
| Protection level | IP67 | Auxiliary voltage | 9–36 V |
| Components | Code | Failure Rate λ/FPMH | Sub-Components or Parts | Code | Failure Rate λ/FPMH |
|---|---|---|---|---|---|
| Battery system | |||||
| Battery module | gb1 | 3.453 | Signal connector for battery system | eb1 | 0.1757 |
| Battery cells module | eb2 | 3.2000 | |||
| Signal connectors for battery cells module | eb3 | 0.0768 | |||
| Master controller of BMS | gb2 | 1.7010 | PCB of master controller for BMS | eb4 | 0.3567 |
| SMCs of master controller for BMS | eb5 | 1.3443 | |||
| Slave controller of BMS | gb3 | 1.6324 | PCB of slave controller for BMS | eb6 | 0.3356 |
| SMCs of slave controller for BMS | eb7 | 1.2968 | |||
| Power electronic device | gb4 | 0.9213 | Fuse of main circuit (i.e., Fuse A) | eb8 | 0.7600 |
| Relay of main circuit (i.e., Relay B) | eb9 | 0.1613 | |||
| Sensors | gb5 | 1.544 | Current sensor | eb10 | 0.6450 |
| Voltage sensor | eb11 | 0.6350 | |||
| Temperature sensor | eb12 | 0.2640 | |||
| Power Distribution Unit | |||||
| Relay | ep1 | ||||
| Fuse | ep2 | ||||
| Connector | ep3 | 0.0172 | |||
| Motor controller | |||||
| Control module | gc1 | 1.888 | PCB of control module | ec1 | 0.2357 |
| SMCs of control module | ec2 | 1.6527 | |||
| Driver module | gc2 | 1.495 | PCB of driver module | ec3 | 0.1041 |
| SMCs of driver module | ec4 | 1.3907 | |||
| Discharging module | gc3 | 0.282 | PCB of discharging module | ec5 | 0.0053 |
| SMCs of discharging module | ec6 | 0.2762 | |||
| Communication module | gc4 | 0.341 | PCB of communication module | ec7 | 0.0086 |
| SMCs of communication module | ec8 | 0.3319 | |||
| Other controller components | gc5 | 0.516 | DC link capacitor | ec9 | 0.0510 |
| IGBT*3 | ec10 | 0.4650 | |||
| Drive motor | |||||
| Rotor | gm1 | 0.300 | Rotor armature winding | em1 | 0.2772 |
| Rotor shaft | em2 | 0.0226 | |||
| Stator | gm2 | 0.252 | Stator winding | em3 | 0.2520 |
| Stator core | em4 | 0.0003 | |||
| Transducer | gm3 | 0.258 | Temperature sensor | em5 | 0.2195 |
| Position sensor | em6 | 0.0375 | |||
| Other motor components | gm4 | 0.568 | Spline | em7 | 0.0385 |
| Bearing oil seal | em8 | 0.4465 | |||
| Bearing | em9 | 0.0830 | |||
| Subsystem of Powertrain | Code | Subsystem of Powertrain | Code | ||
|---|---|---|---|---|---|
| Battery system | S1 | Drive motor | S3 | 5.990 | |
| PDU | S2 | 0.954 | Motor controller | S4 | 1.715 |
| Powertrain system | S | 17.910 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, Q.; Shu, X.; Zhu, G.; Wang, J.; Yang, H. Reliability Study of BEV Powertrain System and Its Components—A Case Study. Processes 2021, 9, 762. https://doi.org/10.3390/pr9050762
Tang Q, Shu X, Zhu G, Wang J, Yang H. Reliability Study of BEV Powertrain System and Its Components—A Case Study. Processes. 2021; 9(5):762. https://doi.org/10.3390/pr9050762
Chicago/Turabian StyleTang, Qian, Xiong Shu, Guanghui Zhu, Jiande Wang, and Huan Yang. 2021. "Reliability Study of BEV Powertrain System and Its Components—A Case Study" Processes 9, no. 5: 762. https://doi.org/10.3390/pr9050762
APA StyleTang, Q., Shu, X., Zhu, G., Wang, J., & Yang, H. (2021). Reliability Study of BEV Powertrain System and Its Components—A Case Study. Processes, 9(5), 762. https://doi.org/10.3390/pr9050762