
Study on Failure Energy per Unit Area of Concrete Specimens Based on Minimum Energy Dissipation Theory


Abstract
:1. Introduction
2. Methods
3. Materials and Experiment
3.1. Materials
3.2. Experimental Result
4. Numerical Simulation
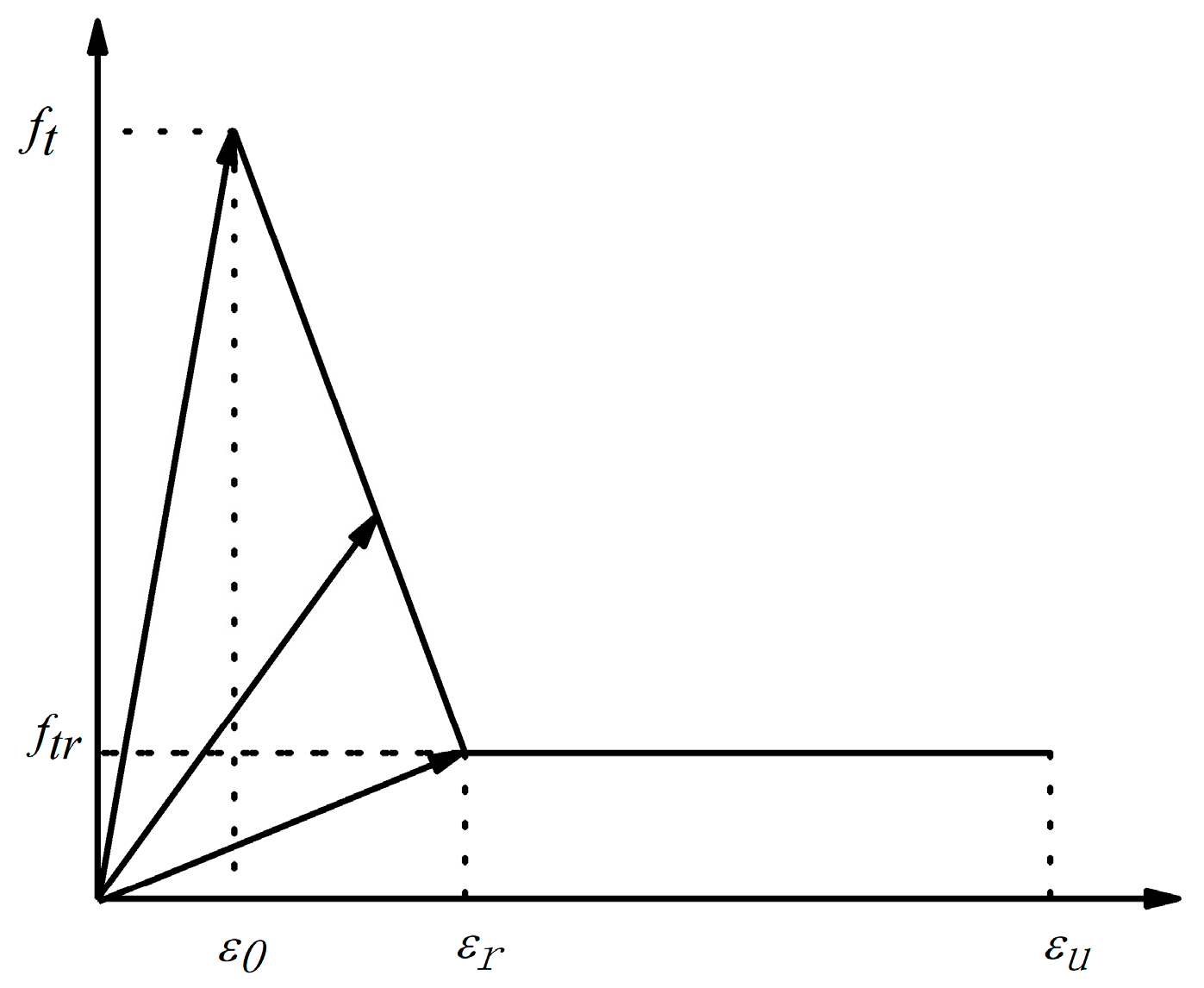
4.1. Constitutive Model
4.2. Numerical Model
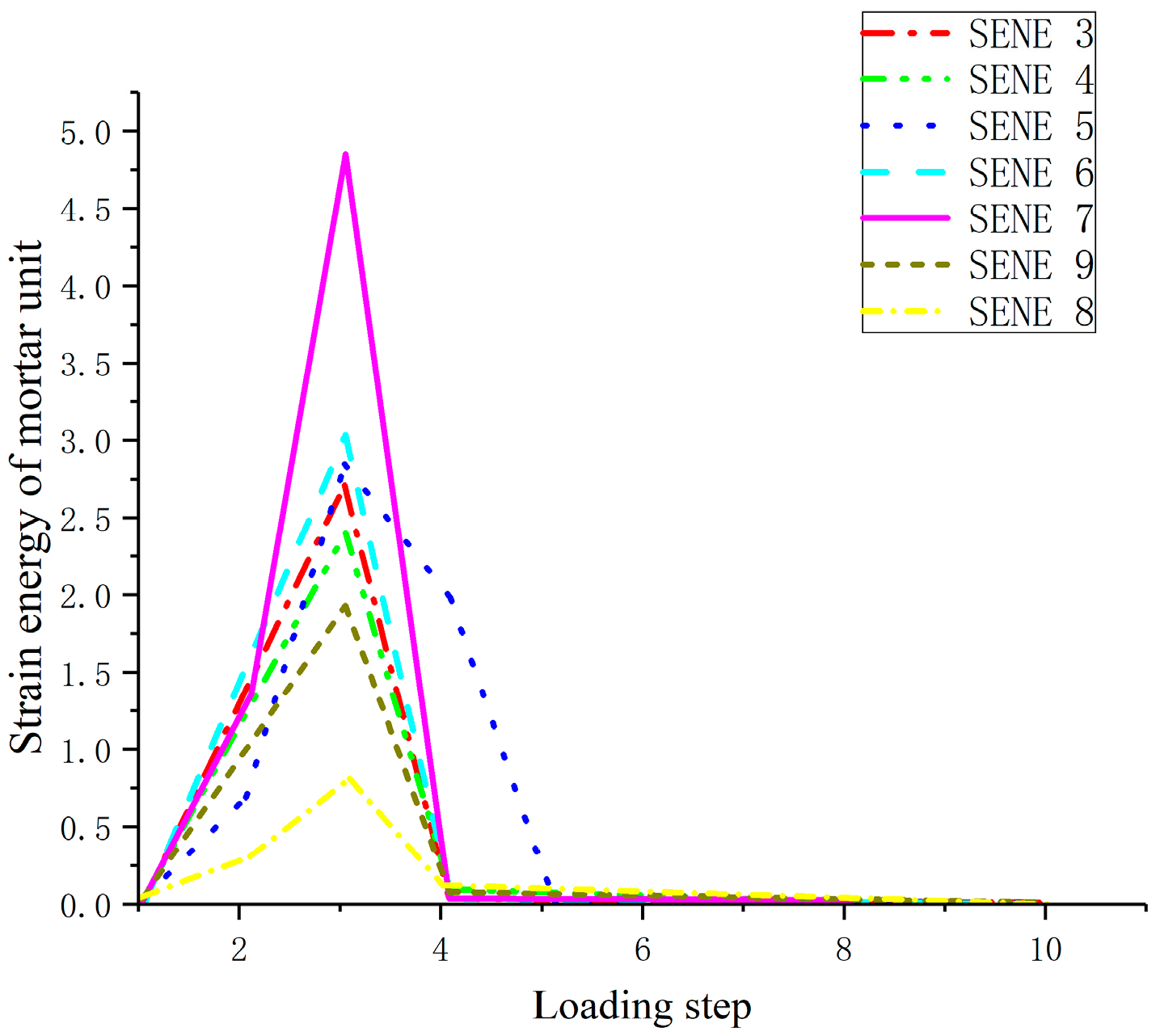
4.3. Numerical Simulation Calculation
5. Results and Discussion
5.1. Failure Area and Failure Energy
5.2. Study on Failure Energy per Unit Area of Concrete Specimens
6. Conclusions
- (1)
- In the numerical simulation procedure, the fracture process of concrete specimens is considered as elastic–brittle failure. By further studying the relationship between the failure energy consumed by each specimen under different loading conditions and the failure area, the relationship equation between the two is established, and it is concluded that the failure energy per unit of the failure area, that is, the unit fracture energy W, is a constant during the fracture process of concrete materials. The failure energy per unit area is related to the physical properties of concrete materials. Different mix ratios, different aggregates and different cement grades lead to different failure energy W per unit area, which is consistent with Rittinger’s new surface energy theory.
- (2)
- The failure process of concrete specimens is a process of overcoming material continuity and generating a new surface. When the concrete specimens break per unit area, a new surface of twice the area will be generated, and the surface energy inside the material overcome by the new surface is the energy consumed per unit area of damage. Therefore, the larger the failure area of the specimen, the more strain energy stored in the material is consumed, the more energy the specimen absorbs from the outside world, and the better the specimen is able to bear external work, due to its greater bearing capacity and greater strength.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- You, M.Q.; Hua, A.Z. Energy analysis on failure process of rock specimen. Chin. J. Rock Mech. Eng. 2002, 21, 778–781. [Google Scholar]
- Song, X.F.; Zhang, B.S.; Lin, X.Y.; Guo, J.Q. Energy evolution during uniaxial loading failure of sandstone. Coal Eng. 2021, 53, 132–137. [Google Scholar]
- Akdag, S.; Karakus, M.; Nguyen, G.D.; Taheri, A.; Bruning, T. Evaluation of the propensity of strain burst in brittle granite based on post-peak energy analysis. Undergr. Space 2021, 6, 1–11. [Google Scholar] [CrossRef]
- Manouchehrian, A.; Cai, M. Simulation of unstable rock failure under unloading conditions. Can. Geotech. J. 2016, 53, 22–34. [Google Scholar] [CrossRef]
- Munoz, H.; Taheri, A.; Chanda, E.K. Rock Drilling Performance Evaluation by an Energy Dissipation Based Rock Brittleness Index. Rock Mech. Rock Eng. 2016, 49, 3343–3355. [Google Scholar] [CrossRef]
- Mandavian, D.; Javadi, A. Numerical analysis of fluid-rock interactions in hydraulic fracturing. Proc. Inst. Civ. Eng.-Eng. Comput. Mech. 2018, 171, 162–173. [Google Scholar]
- Yang, X.H.; Zhou, Z.Y.; He, X.J.; Zhang, Y.J. Effect of steel fiber on stress intensity factor near a concrete crack tip. J. Hunan Univ. Sci. Technol. Nat. Sci. Ed. 2009, 24, 48–50, 60. [Google Scholar]
- Bhoir, S.; Adsul, N.; Charhate, S. Study and Analysis of High Performance Concrete and Estimation of Concrete Strength. Int. J. Recent Adv. Eng. Technol. 2016, 4, 14–18. [Google Scholar]
- Kouddane, B.; Sbartaï, Z.M.; Alwash, M.; Ali-Benyahia, K.; Elachachi, S.M.; Lamdouar, N.; Kenai, S. Assessment of Concrete Strength Using the Combination of NDT-Review and Performance Analysis. Appl. Sci. 2022, 12, 12190. [Google Scholar] [CrossRef]
- Stawiski, B.; Kania, T. Examining the Distribution of Strength across the Thickness of Reinforced Concrete Elements Subject to Sulphate Corrosion Using the Ultrasonic Method. Materials 2019, 12, 2519. [Google Scholar] [CrossRef] [PubMed]
- Phan, D.H.; Patel, V.I.; Liang, Q.Q.; Al Abadi, H.; Thai, H.T. Simulation of uniaxially compressed square ultra-high-strength concrete-filled steel tubular slender beam-columns. Eng. Struct. 2021, 232, 111795. [Google Scholar] [CrossRef]
- Saleh, E.F.; Tarawneh, A.N.; Katkhuda, H.N. A comprehensive evaluation of existing and new model-identification approaches for non-destructive concrete strength assessment. Constr. Build. Mater. 2022, 334, 127447. [Google Scholar] [CrossRef]
- Sbartaï, Z.M.; Alwash, M.; Breysse, D.; Romão, X.; Luprano, V.A. Combining the bi-objective approach and conditional coring for a reliable estimation of on-site concrete strength variability. Mater. Struct. 2021, 54, 230. [Google Scholar] [CrossRef]
- Bažant, Z.P.; Tabbara, M.R.; Kazemi, M.T.; Pijaudier-Cabot, G. Random particle model for fracture of aggregate or fiber composites. J. Eng. Mech. ASCE 1990, 116, 1686–1705. [Google Scholar] [CrossRef]
- Bouafia, Y.; Smahi, R.; Dumontet, H.; Kachi, M.S. Modeling the behavior of concrete by damage mechanics with a Poisson’s ratio variable. Procedia Mater. Sci. 2014, 3, 714–719. [Google Scholar] [CrossRef]
- Dragon, A.; Mróz, Z. A continuum model for plastic-brittle behaviour of rock and concrete. Int. J. Eng. Sci. 1979, 17, 121–137. [Google Scholar] [CrossRef]
- Lee, J.H.; Fenves, G.L. Plastic-damage model for cyclic loading of concrete structures. J. Eng. Mech.-ASCE 1998, 124, 892–900. [Google Scholar] [CrossRef]
- Li, S.C.; Diao, B.; Ye, Y.H. Segment curve damage constitutive model of concrete based on energy method. Ind. Archit. 2007, 37, 1–4. [Google Scholar]
- Yu, Z.W.; Shan, Z. Advances in researches on stochastic damage models of concrete. Eng. Mech. 2018, 35, 1–8, 13. [Google Scholar] [CrossRef]
- Shen, J.; Arruda MR, T.; Pagani, A. Concrete damage analysis based on higher-order beam theories using fracture energy regularization. Mech. Adv. Mater. Struct. 2023, 30, 4582–4596. [Google Scholar] [CrossRef] [PubMed]
- Bai, Z.Z.; Ma, R.J.; Qu, D.G. Fracture Mechanics of Concrete; Tongji University Press: Shanghai, China, 2020. [Google Scholar]
- Zhou, Z.B. Principle of Minimum Energy Consumption and Its Application; Science Press: Beijing, China, 2001. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Pull-1 | Pre-(1) | Pre-(2) | Pre-(3) | Pre-(4) | Pre-(5) | Bending-1 | Twist-1 |
|---|---|---|---|---|---|---|---|---|
| (R × H) mm (L × B × H) mm | 30 × 120 | 30 × 30 | 30 × 60 | 30 × 120 | 30 × 180 | 30 × 300 | 30 × 120 | 30 × 120 |
| Aspect Ratio λ | ≤1 | 1~10 | ≥10 |
|---|---|---|---|
| Failure mode | Brittle failure | Brittle failure | Brittle failure |
| Failure pattern of specimen |  |  |  |
| Failure mechanism | Shear cable-stayed failure | Shear failure predominates | Bending failure |
| Different Loading Forms | Pull-1 | Pre-1 | Pre-3 | Pre-5 | Twist-1 | Bending-1 |
|---|---|---|---|---|---|---|
| Damaged area SD (m2) | 0.002,826 | 0.025,43 | 0.016 | 0.002,826 | 0.002,115 9 | 0.002,826 |
| Failure energy U (J) | 0.002,826 R | 0.025,43 R | 0.016 R | 0.002,826 R | 0.002,115 9 R | 0.002,826 R |
| Model | Strength (MPa) | Unit Average Failure Energy (J) | Failure Energy (J) | Number of Damaged Elements | Failure Energy per Unit Area (MJ/cm2) |
|---|---|---|---|---|---|
| Pull-1 | 7.56 | 4.29 × 10−5 | 0.5 | Sj:34,069 Jm:11,033 45,212 | 2.02 |
| Pre-1 | 29.78 | 2.78 × 10−4 | 11 | Sj:14,892 Jm:26,356 41,248 | 5.24 |
| Pre-2 | 22,287.7 | 1.78 × 10−4 | 10.8 | Sj:12,041 Jm:62,8 98 74,939 | 5.38 |
| Pre-3 | 18,409.1 | 1. 07 × 10−4 | 8.82 | Sj:13,002, Jm:46,391 59,393 | 5.06 |
| Pre-4 | 14,098.4 | 2.03 × 10−4 | 5.233 5 | Sj:36,110 Jm:27,792 63,802 | 4.98 |
| Pre-5 | 15,378.0 | 5.31 × 10−5 | 3.671 96 | Sj:12,041 Jm:62,674 74,715 | 4.93 |
| Bending-1 | 6.2 | 3.25 × 10−5 | 1.5 | SJ:3,088 Jm:14,442 17,530 | 2.17 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, X.; Wu, Z. Study on Failure Energy per Unit Area of Concrete Specimens Based on Minimum Energy Dissipation Theory. Materials 2024, 17, 201. https://doi.org/10.3390/ma17010201
Liang X, Wu Z. Study on Failure Energy per Unit Area of Concrete Specimens Based on Minimum Energy Dissipation Theory. Materials. 2024; 17(1):201. https://doi.org/10.3390/ma17010201
Chicago/Turabian StyleLiang, Xinyu, and Zengbiao Wu. 2024. "Study on Failure Energy per Unit Area of Concrete Specimens Based on Minimum Energy Dissipation Theory" Materials 17, no. 1: 201. https://doi.org/10.3390/ma17010201
APA StyleLiang, X., & Wu, Z. (2024). Study on Failure Energy per Unit Area of Concrete Specimens Based on Minimum Energy Dissipation Theory. Materials, 17(1), 201. https://doi.org/10.3390/ma17010201